ICLR, ‘17,
Few-Shot Learning with Graph Neural Networks
Summary
- Used similarity value between samples for few shot learning.
- Regard each sample as nodes, and similarity kernel as edges.
- Similarity kernel is trainable. (i.e. Not just simple inner product)
- Can be applied to semi-supervised learning and active learning.
- State-of-the-art performance in Omniglot and Mini-ImageNet in 2017.
Keywords
- Few shot learning
- Graph neural network
- Semi-supervised learning
- Active learning with Attention
Introduction
- Supervised end-to-end learning has been extremely successful in computer vision, speech, or machine translation tasks.
- However, there are some tasks(e.g. few shot learning) that cannot achieve high performance with conventional methods.
- New supervised learning setup
- Input-output setup:
- With i.i.d. samples of collections of images and their associated label similarity
- cf) conventional setup: i.i.d. samples of images and their associated labels
- Input-output setup:
- Authors’ model can be extended to semi-supervised and active learning
-
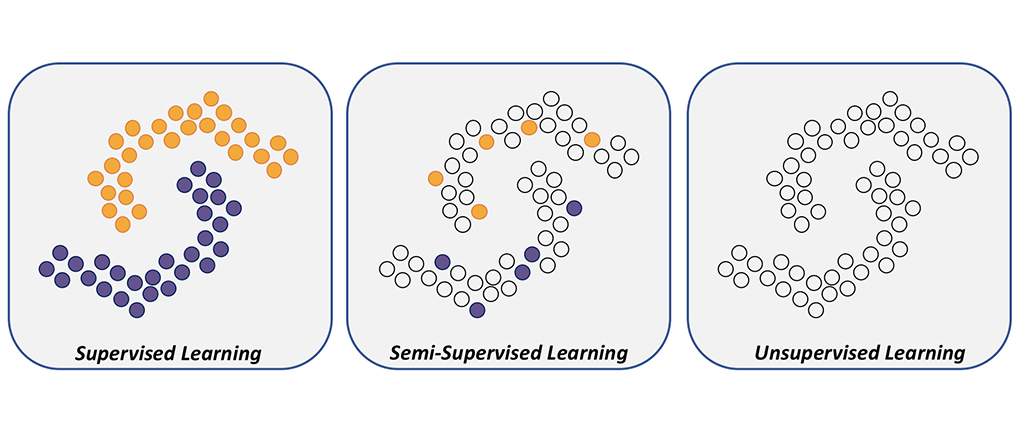
Semi-supervised learning:
Learning from a mixture of labeled and unlabeled examples
-
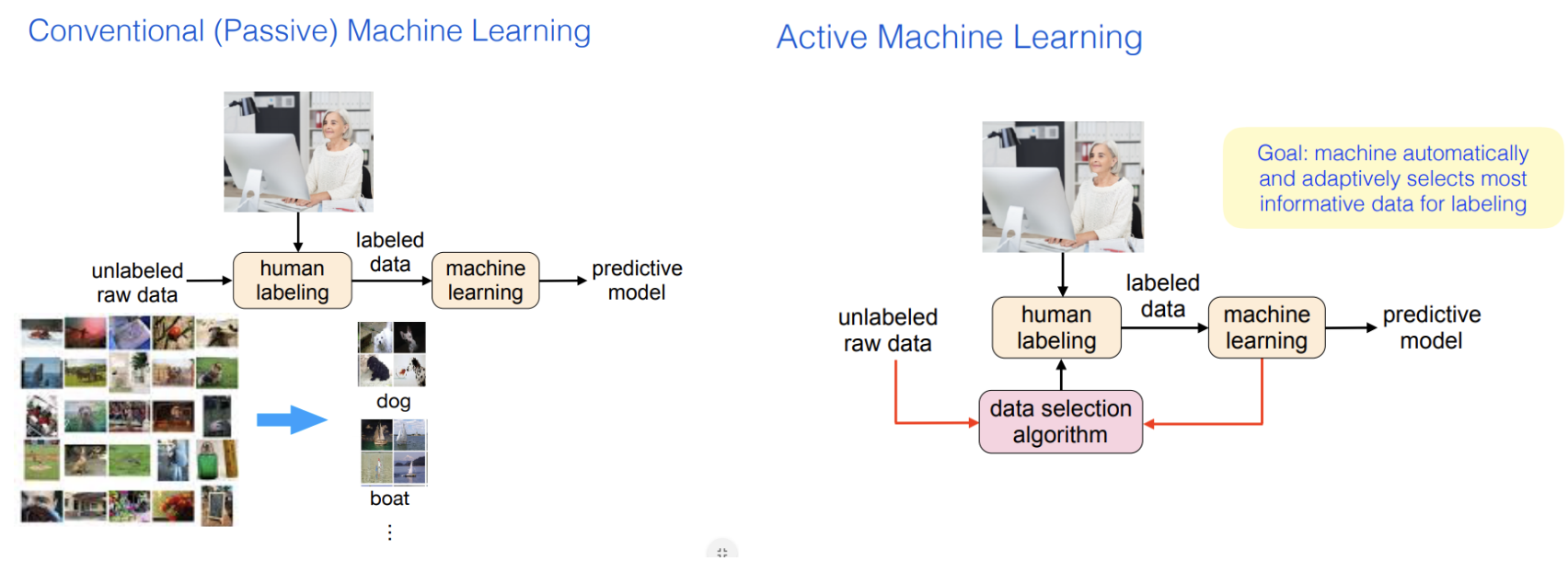
Active learning:
The learner has the option to request those missing labels that will be most helpful for the prediction task
-
Closely related works and ideas
-
[Research article] Matching Networks for One shot learning - Vinyals et al.(2016)
-
Mapped support set of images into the desired label.
-
And developed an end-to-end trainable k-nearest neighbors, accepting those support sets as input via attention LSTM.
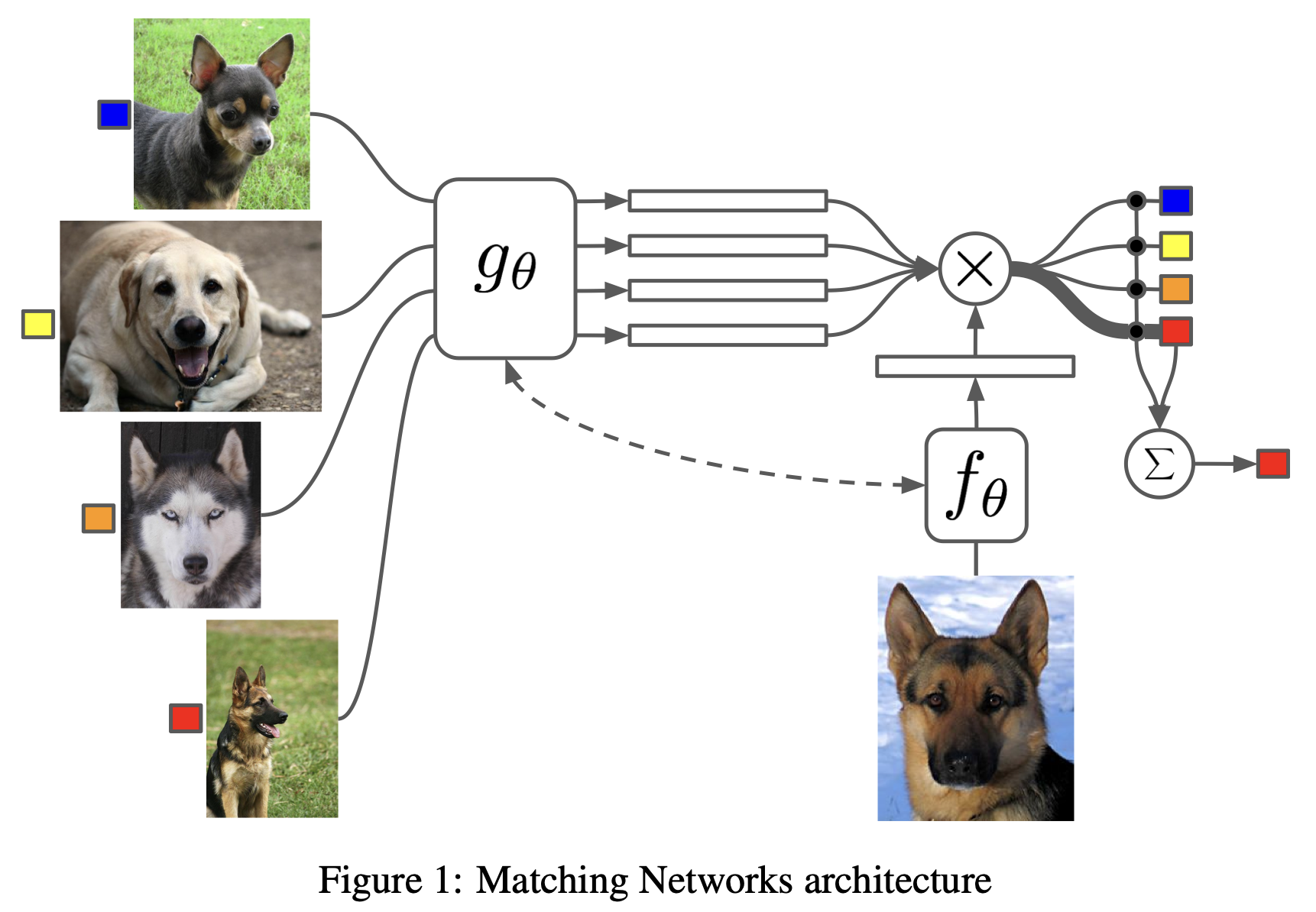
- $k$: number of data in support set
- $\hat{x}$: new data
- $\hat{y}$: its class
- $\hat{y}$ is a linear combination of the labels in the support set
- $a$: attention mechanism, which is a kernel
-
-
[Research article] Prototypical Networks for Few-shot Learning - Snell et al.(2017)
Authors point out the overfitting problem of Matching networks.
- Prototype: Center(mean) of each class cluster
- Similarity: $-\text{Euclidean distance}$
-
[Review article] Geometric deep learning - Bronstein et al.(2017)
“Geometric deep learning is an umbrella term for emerging techniques attempting to generalize deep models to non-Euclidian domains such as graphs and manifolds”
-
[Research article] Message passing - Gilmer et al.(2017)

$$ m^{t+1}_v = \sum_{w \in N(v)} M_t(h^t_v, h^t_w, e_{vw}) \ h^{t+1}_v = U_t(h^t_v, m^{t+1}_v ) $$
- $M_t$: message functions
- $U_t$: vertex update functions
- $h^t_v$: hidden states of node $v$ in the graph at time $t$
- $m^{t+1}_v$: messages of node $v$ in the graph at time $t+1$
- $N(v)$: neighbors of node $v$
e.g.)
Problem set-up
Authors view the task as a supervised interpolation problem on a graph
- Nodes: Images
- Edges: Similarity kernels → TRAINABLE
General set-up
Input-output pairs $(\mathcal{T}_i, Y_i)_i$ drawn from i.i.d. from a distribution $\mathcal{P}$ of partially labeled image collections

- $s$: # labeled samples
- $r$: # unlabled samples
- $t$: # samples to classify
- $K$: # classes
- $\mathcal{P}_l(\mathbb{R}^N)$: class-specific image distribution over $\mathbb{R}^N$
- targets $Y_i$ are associated with $\bar{x}_1, …, \bar{x}_t \in \mathcal{T}_i$
Learning objective:
$\min_\Theta \frac{1}{L} \sum_{i \leq L} \ell(\Phi(\mathcal{T}_i, \Theta), Y_i) + \mathcal{R}(\Theta)$
($\mathcal{R}$ is the standard regularization objective)
Few shot learning setting
$r=0, t=1, s=qK$ $\longrightarrow$ $q-\text{shot} , K-\text{way}$
Semi-supervised learning setting
$r > 0, t=1$
Model can use the auxiliary images(unlabeled set) ${ \tilde{x}_1, …, \tilde{x}_r }$ to improve the prediction accuracy, by leveraging the fact that these samples are drawn from the common distributions.
Active learning setting
The learner has the ability to request labels from the auxiliary images ${\tilde{x}_1, …, \tilde{x}_r}$.
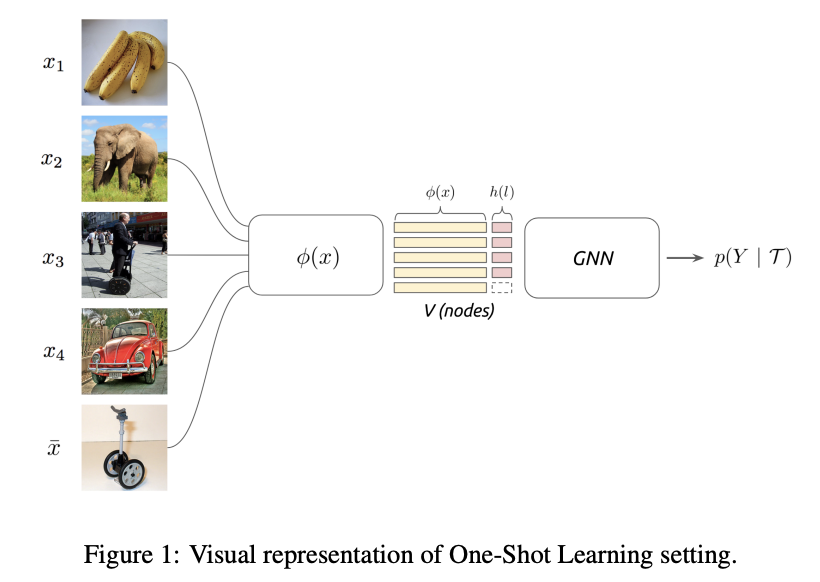
Model
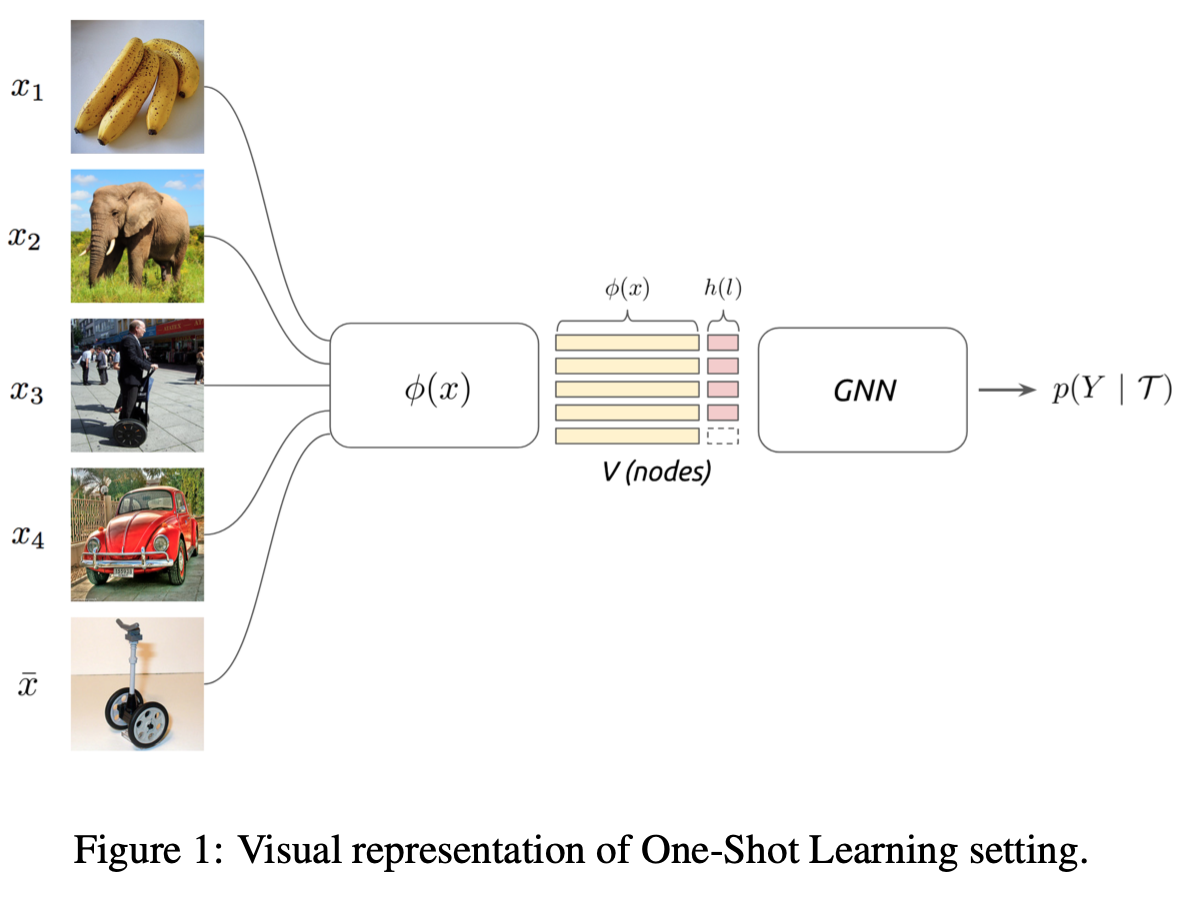
- $\phi(x)$: CNN
- $h(l)$: One-hot encoded label(for labeled set), or uniform distribution(for unlabeled set)
Set and Graph Input Representations
The goal of few shot learning:
To propagate label information from labeled samples towards the unlabeled query image
→ The propagation can be formalized as a posterior inference over a graphical model
$G_\mathcal{T} = (V,E)$
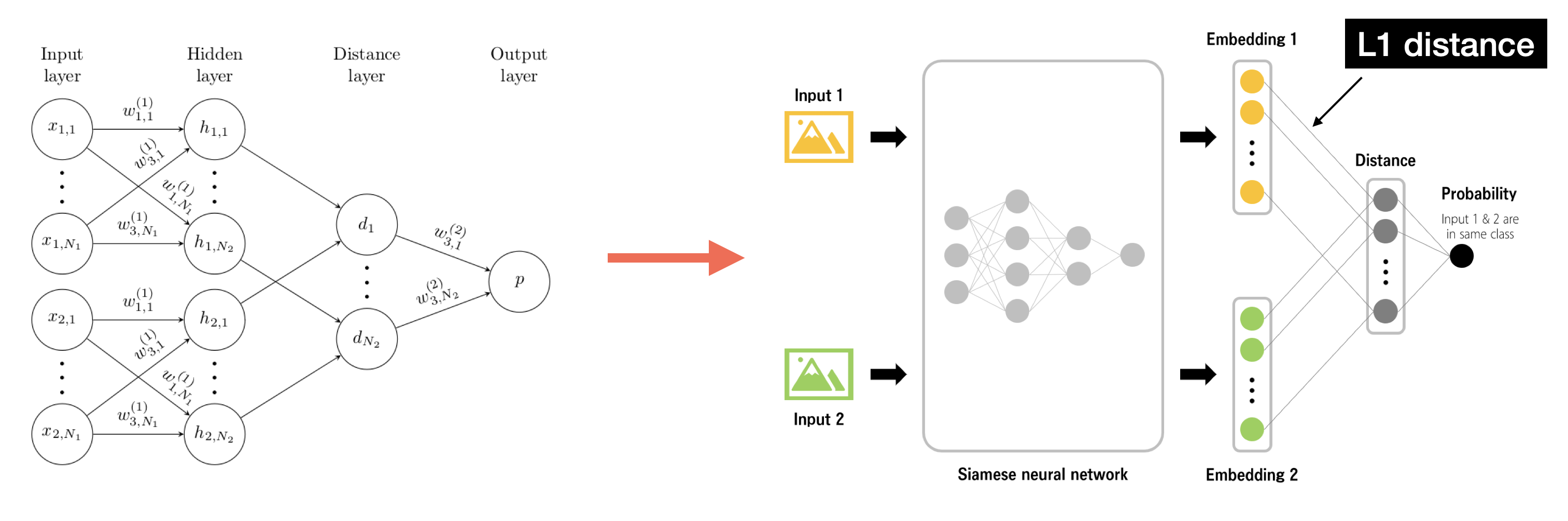
Similarity measure is not pre-specified, but learned!
c.f.) in Siamese network, the similarity measure is fixed(L1 distance)!
본 논문(Few shot learning with GNN)에 쓰인 문장 구조가 이상해서 헷갈리게 쓰여있음.
Graph Neural Networks
We are given an input signal $F \in \mathbb{R}^{V \times d}$ on the vertices of a weighted graph $G$.
Then we consider a family, or a set “$\mathcal{A}$” of graph intrinsic linear operators.
$\mathcal{A} = {\tilde{A}^{(k)}, \mathbf{1}}$
-
Linear operator
e.g.) Simplest linear operator is adjacency operator $A$, where $(AF)i = \sum{j \sim i} w_{i,j}F_j$ ($w_{i,j}$ is associated weight)
GNN layer
A GNN layer $\text{Gc}(\cdot)$ receives as input a signal $\mathbf{x}^{(k)} \in \mathbb{R}^{V\times d_k}$ and produces $\mathbf{x}^{(k+1)} \in \mathbb{R}^{V\times d_{k+1}}$
$$ \mathbf{x}^{(k+1)} = \text{Gc}(\mathbf{x}^{(k)}) = \rho\Big(\sum_{B\in\mathcal{A}} B\mathbf{x}^{(k)}\theta^{(k)}_{B, l}\Big ) $$
$\mathbf{x}^{(k)}$: representation vector of a certain node at time step $k$
$\theta$: trainable parameters
$\rho$: Leaky ReLU
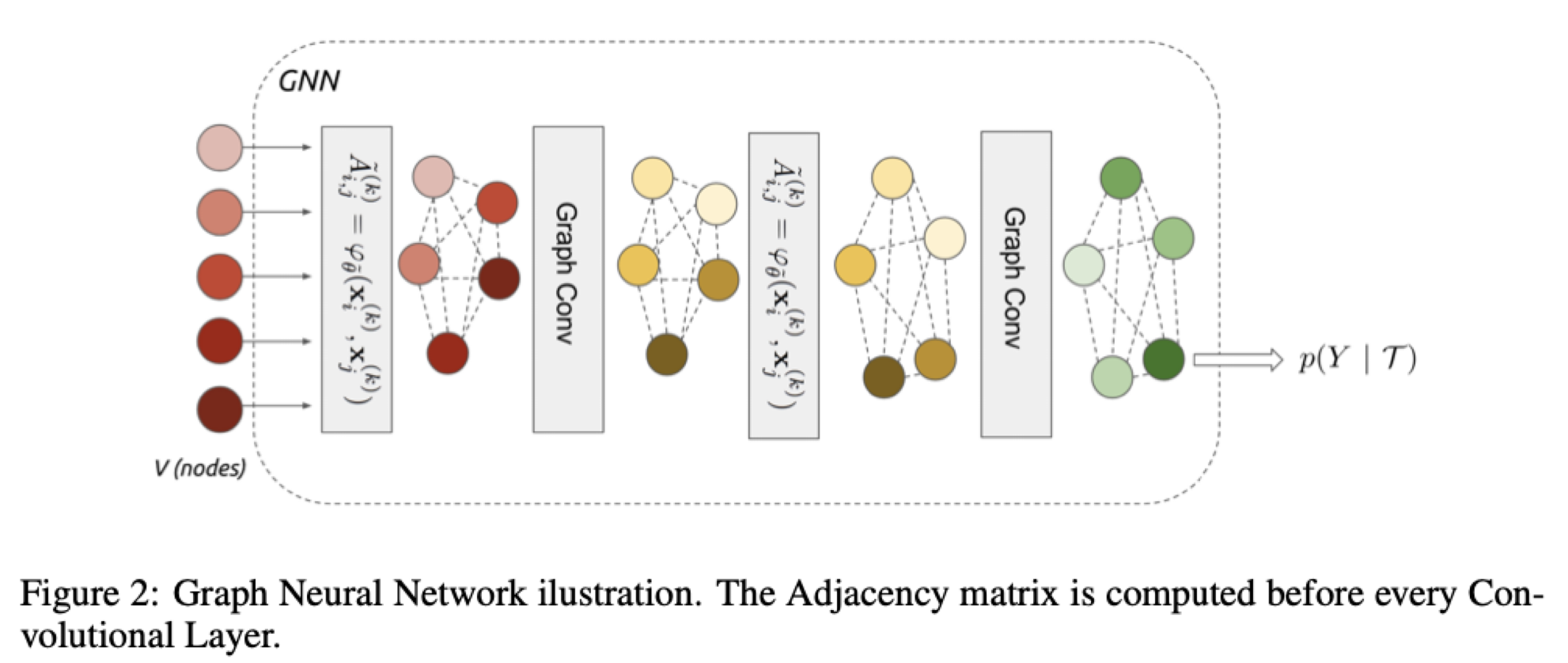
Construction of edge feature matrix, inspired by message passing algorithm
$$ \tilde{A}^{(k)}_{i, j} = \varphi_{\tilde{\theta}}(\mathbf{x}^{(k)}_i, \mathbf{x}^{(k)}_j ) $$
-
$\tilde{A}^{(k)}_{i, j}$: learned edge features from the node’s current hidden representation(at time step $k$)
-
$\varphi$: a metric and a symmetric function parameterized with neural network
$$ \varphi_{\tilde{\theta}}(\mathbf{x}^{(k)}_i, \mathbf{x}^{(k)}_j ) = \text{MLP}_{\tilde{\theta}}(abs(\mathbf{x}^{(k)}_i - \mathbf{x}^{(k)}_j)) $$
→ $\tilde{A}^{(k)}$ is then normalized by row-wise softmax
→ And added to the family $\mathcal{A} = {\tilde{A}^{(k)}, \mathbf{1}}$
- $\mathbf{1}$: Identity matrix, which is the self-edge to aggregate vertex’s own features
Construction of initial node features
$$ \mathbf{x}^{(0)}_i = (\phi(x_i), h(l_i)) $$
$\phi$: convolutional neural network
$h(l) \in \mathbb{R}^K_+$ : a one-hot encoding of the label
For images with unknown label, $\tilde{x}_j$(unlabeled data) and $\bar{x}_j$(test data), $h(l_j)$ is set with uniform distribution.
Training
Few-shot and Semi-supervised learning
The final layer of GNN is a softmax mapping. We then use cross-entropy loss:
$$ \ell(\Phi(\mathcal{T}; \Theta), Y) = -\sum_k y_k \log P(Y_* = y_k , |, \mathcal{T}) $$
The semi-supervised setting is trained identically, but the initial label fields of $\tilde{x}_j$s will be filled with uniform distribution.
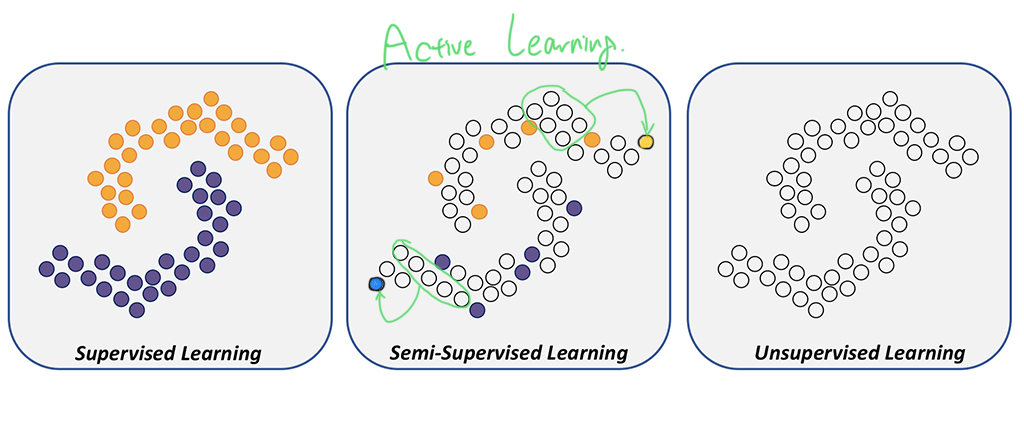
Active learning (with attention)
In active learning, the model has the intrinsic ability to query for one of the labels from ${ \tilde{x}_1, …, \tilde{x}_r }$.
The network will learn to ask for the most informative label to classify the sample $\bar{x}$.
The querying is done after the first layer of GNN by using a softmax attention over the unlabeled nodes of the graph.
Attention
We apply a function $g(\mathbf{x}^{(1)}_i) \in \mathbb{R}^1$ that maps each unlabeld vector node to a scalar value.
A softmax is applied over the ${1, …, r}$ scalar values obtained after applying $g$:
$r$: # unlabeled samples
$$ \text{Attention} = \text{Softmax}(g(\mathbf{x}^{(1)}_{{1,…,r}})) $$
To query only one sample we set all elements to zero except for one. → $\text{Attention}'$
- At training, model randomly samples one value based on its multinomial probability.
- At test, model just keeps the maximum value.
Then we multiply this with the label vectors
$$ w \cdot h(l_{i*}) = \langle \text{Attention}’, h(l_{{1, …, r}}) \rangle $$
($w$ is scaling factor)
This value is then summed to the current representation.
$$ \mathbf{x}^{(1)}_{i*} = [\text{Gc}(\mathbf{x}^{(0)}_{i*}), \mathbf{x}^{(0)}_{i*}] = [\text{Gc}(\mathbf{x}^{(0)}_{i*}), (\phi(x_{i*}), h(l_{i*}))] $$
Results
Few-shot learning
Omniglot
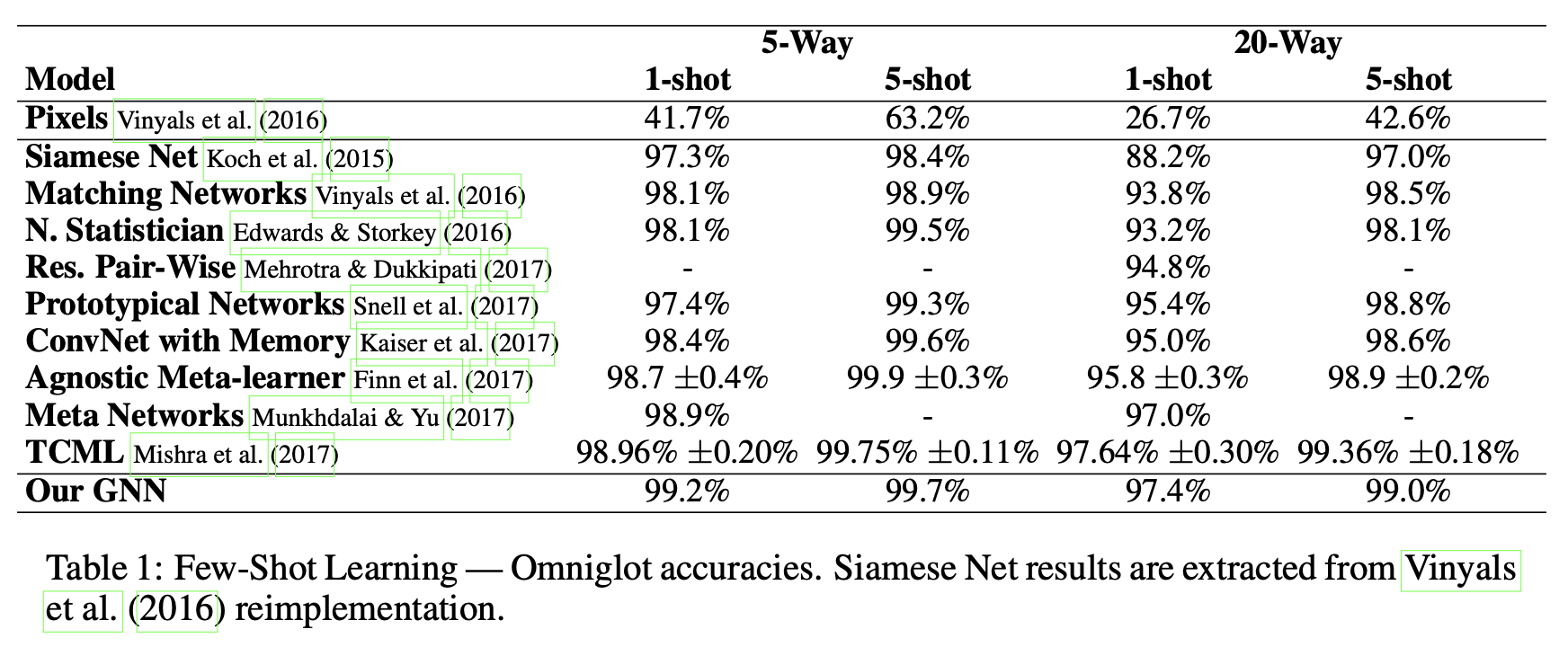
# of parameters: $\sim5\text{M} (\text{TCML})$, $\sim300 \text{K}(3 \text{layers GNN})$
Omniglot: 1,623 characters X 20 examples for each characters
Mini-ImageNet: Originally introduced by Vinyals et al.(2016)
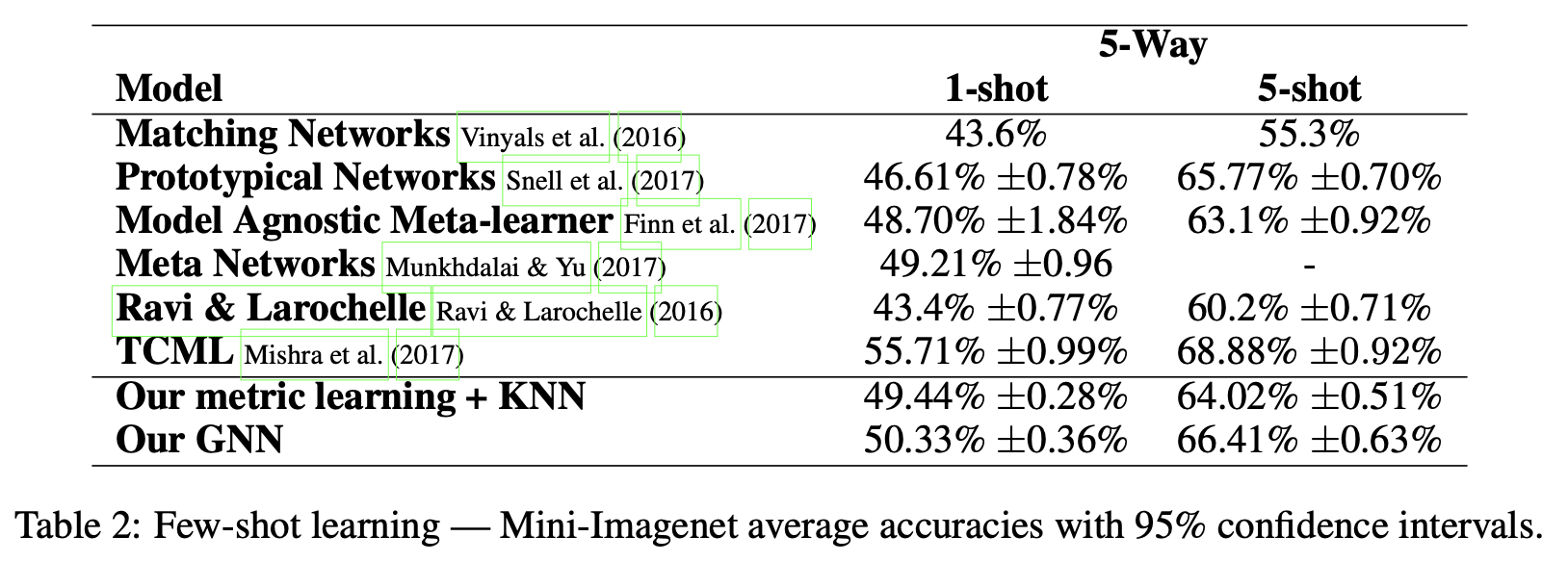
# of parameters: $\sim 11\text{M} (\text{TCML})$, $\sim 400 \text{K}(3 \text{ layers GNN})$
Mini-ImageNet
Divided into 64 training, 16 validation, 20 testing classes each containing 600 examples.
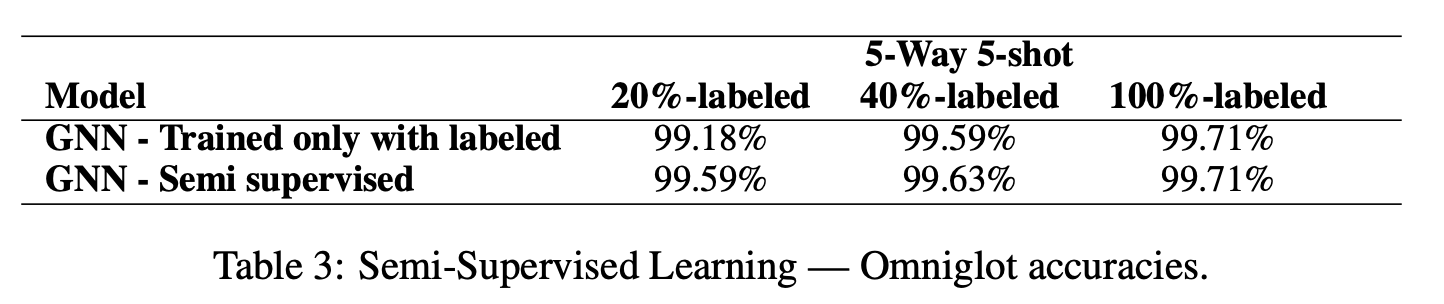
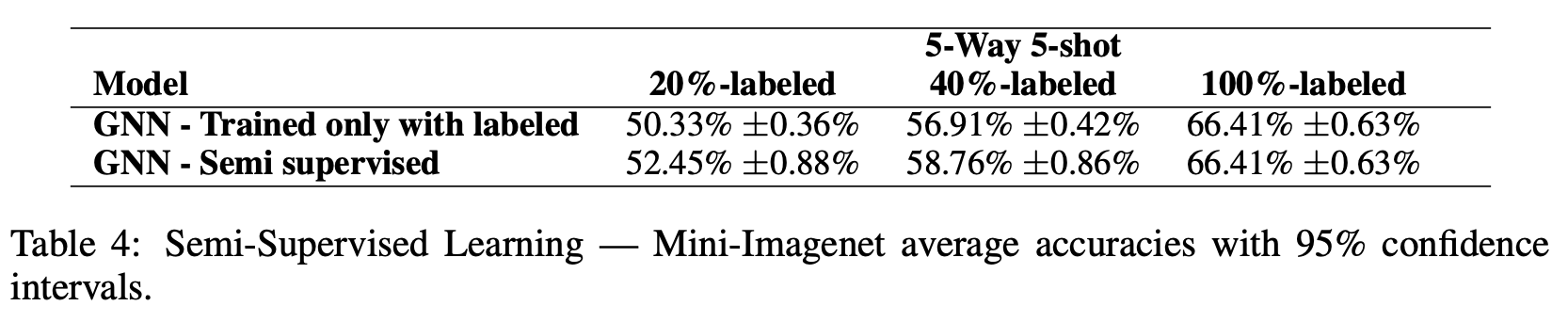
Semi-supervised learning
Omniglot
Mini-ImageNet
Active learning
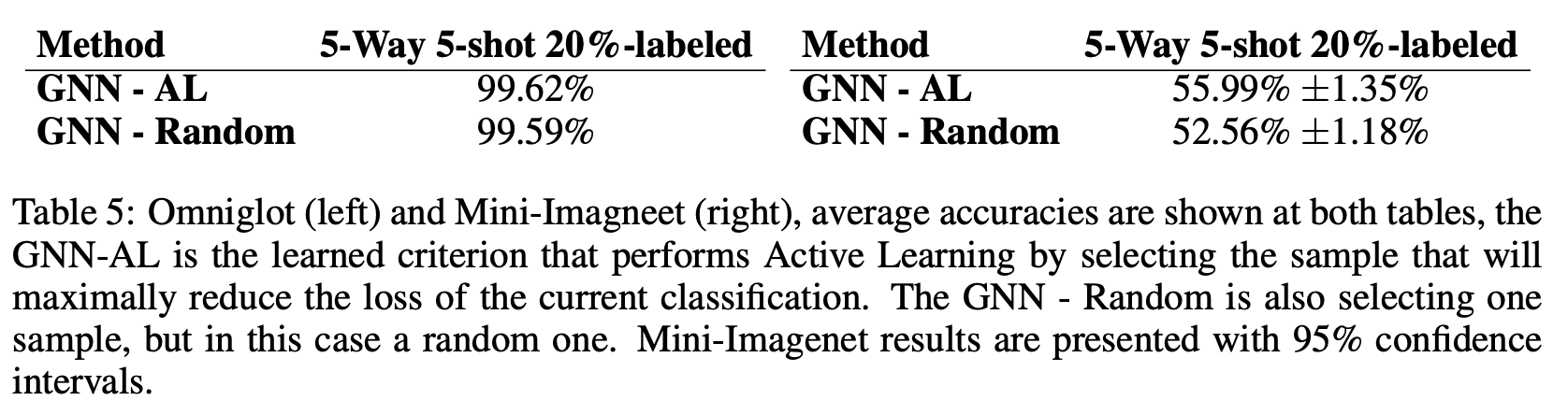
Random: Network chooses a random sample to be labeled, instead of one that maximally reduces the loss of the classification task $\mathcal{T}$