LoG, 22
A Generalist Neural Algorithmic Learner
Summary
- Neural network, especially GNN, can learn traditional computer science algorithms in CLRS book.
- A generalist neural algorithmic learner is necessary if the algorithm is not obvious.
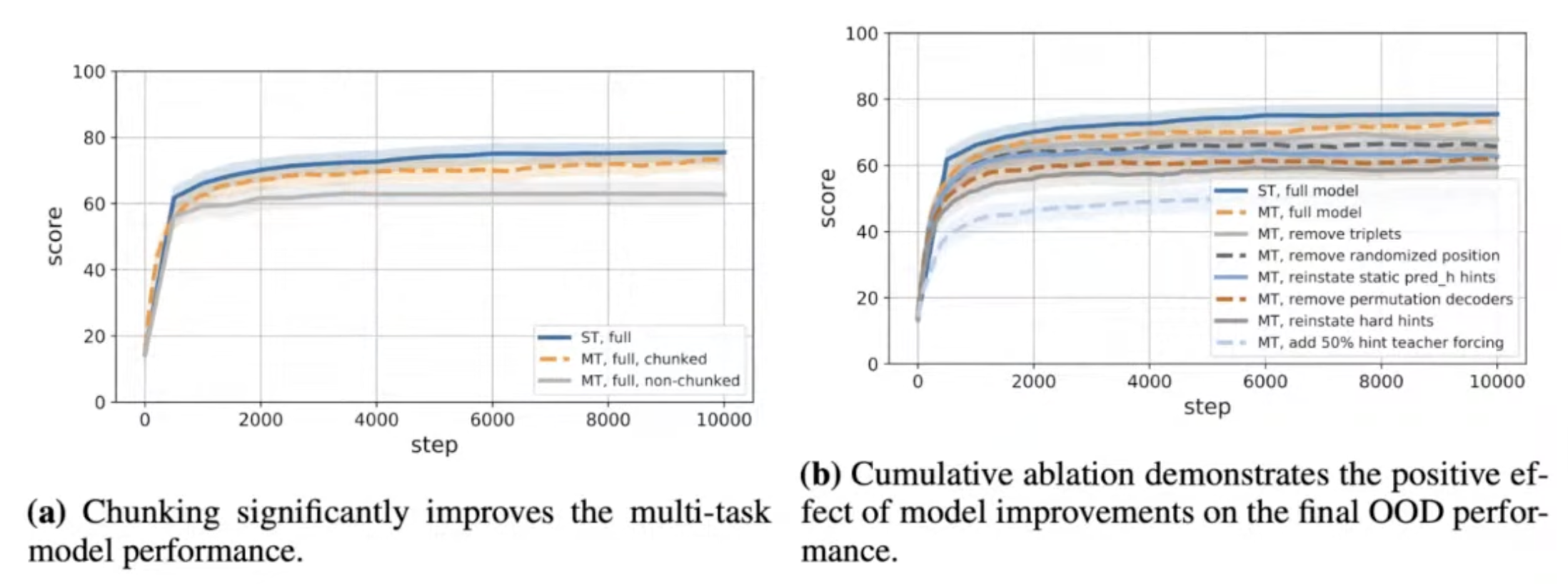
- Chunking mechanism was important to stabilize multi-task learning.
Starting point: A benchmark to train neural computer scientists
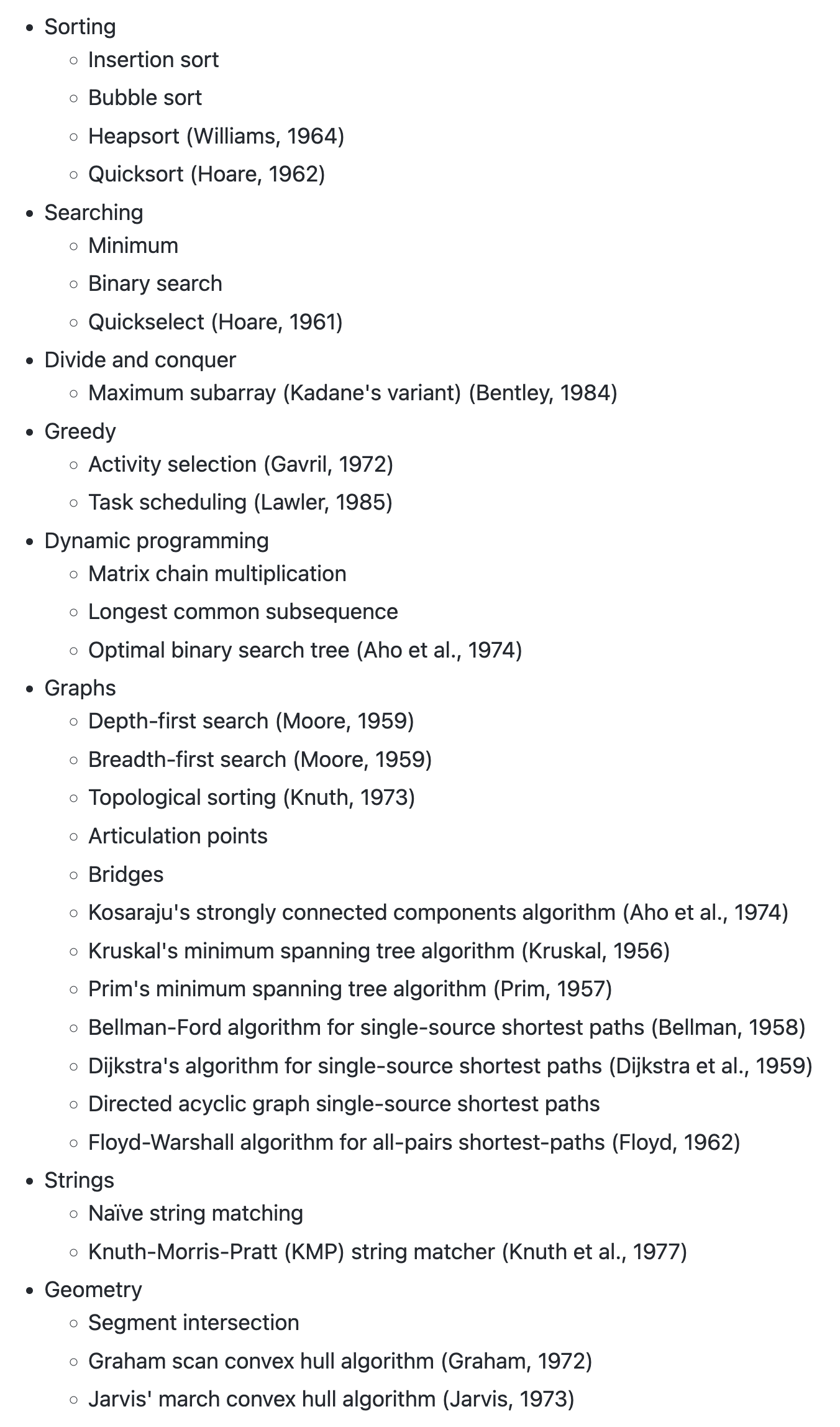
The CLRS Algorithmic Reasoning Benchmark
https://github.com/deepmind/clrs
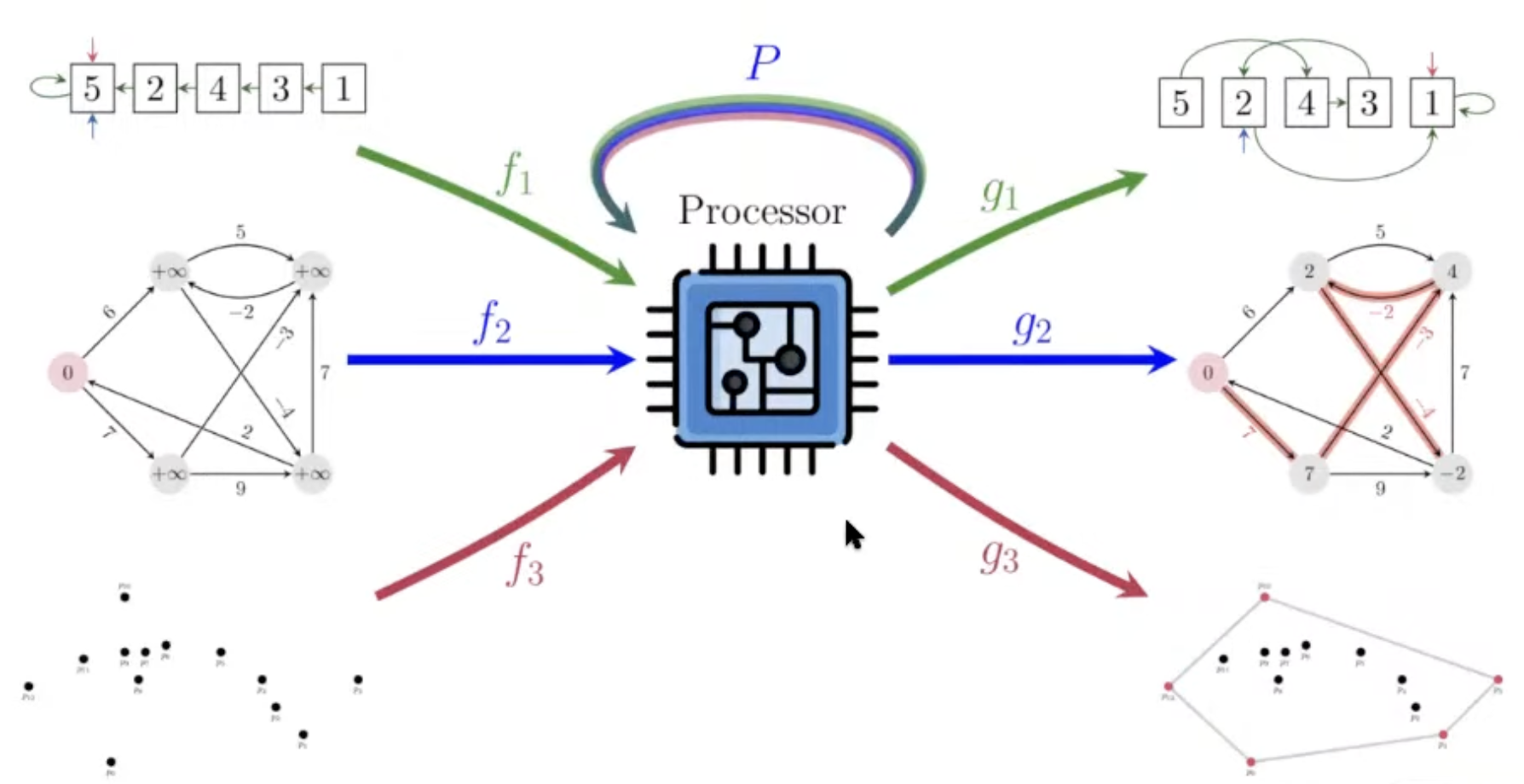
- Can we train a neural network to execute classical CS algorithms?
- A differentiable computer scientist could then apply its “knowledge” to natural inputs.
- We will also ponder: can it learn multiple algorithms at the same time?
- Typically the problem is modeled with a recurrent architecture:
- LSTMs as in, e.g., Differentiable Neural Computers
- Transformers, as in the Universal Transformer
- ConvNets
- GNNs - our approach
Introduction to Algorithms: CLRS
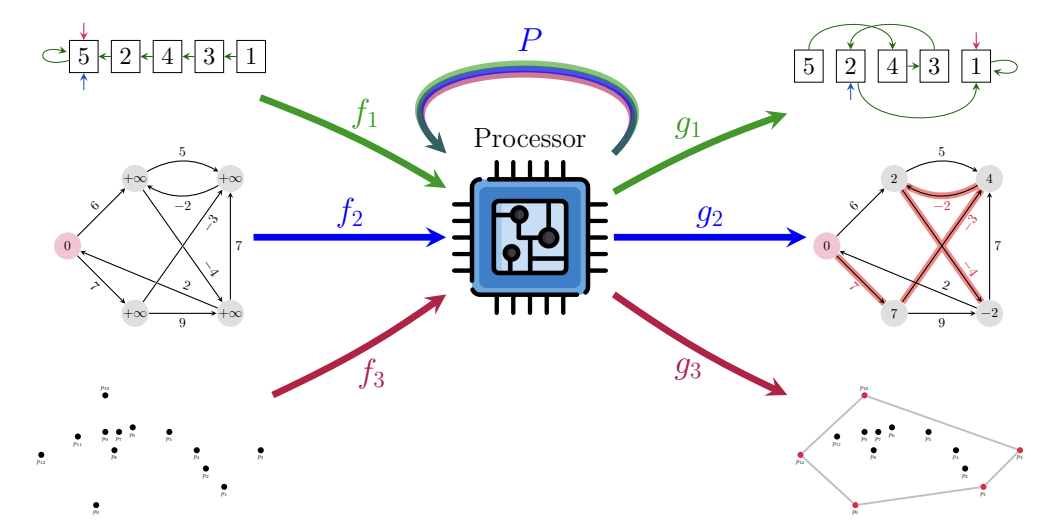
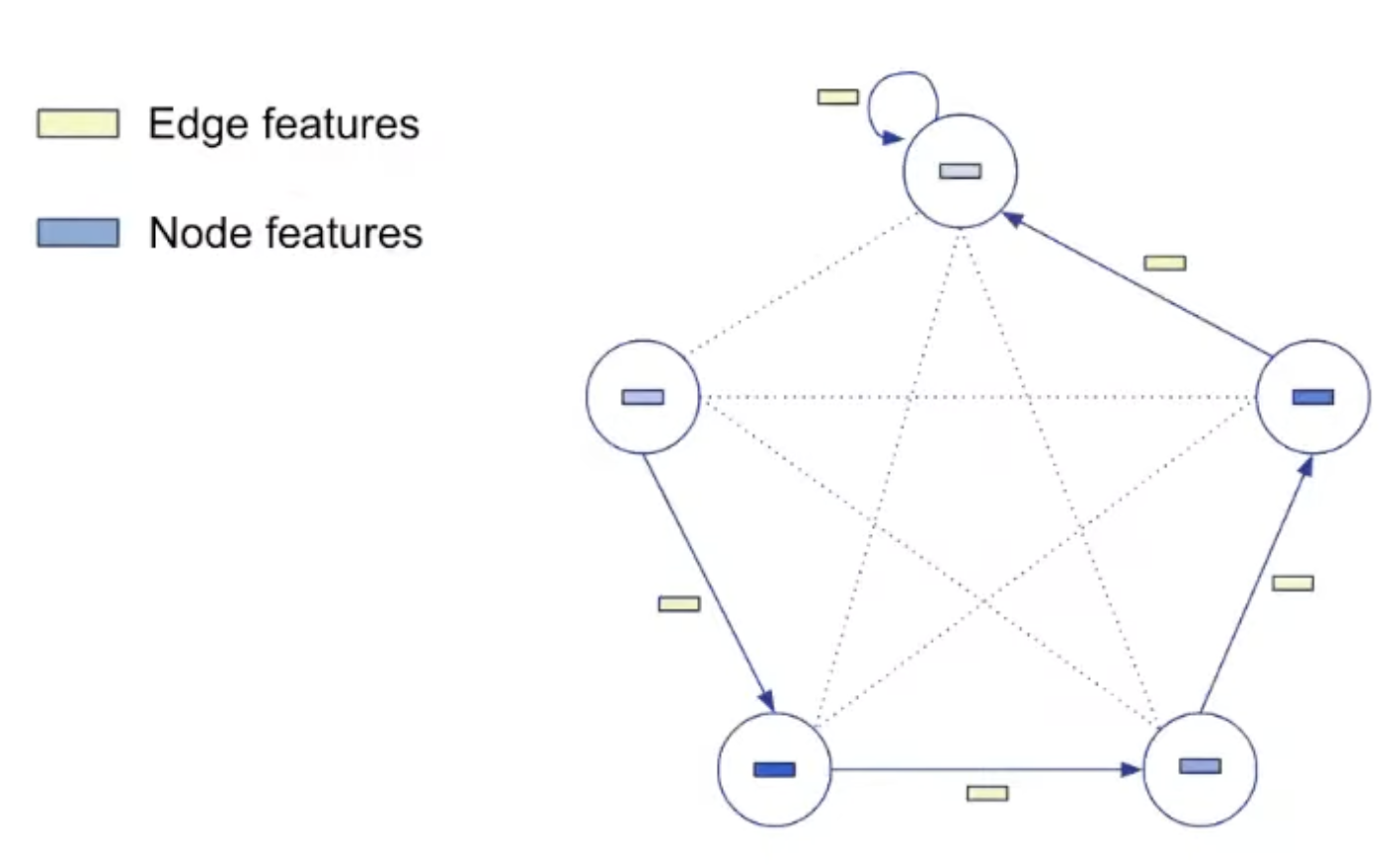
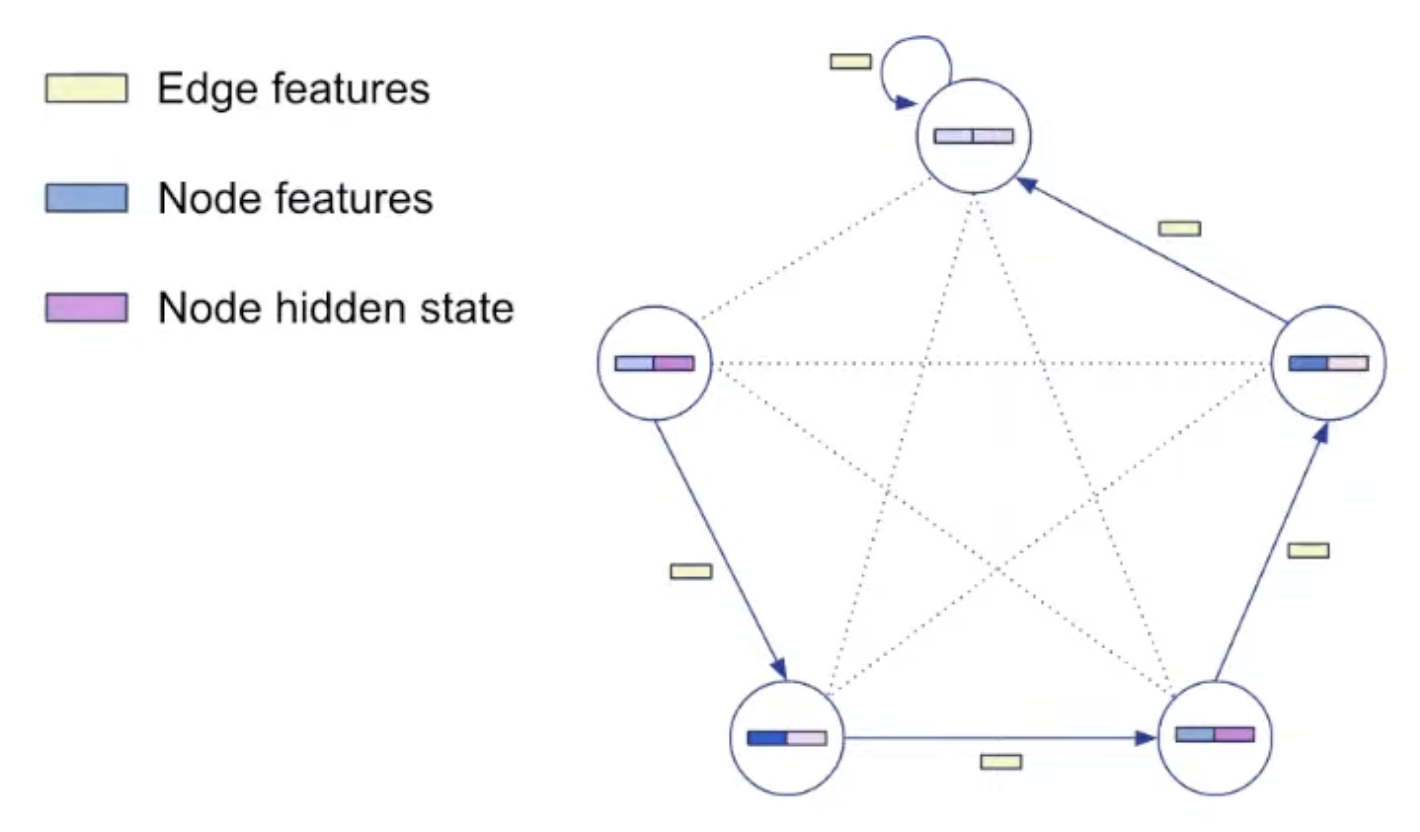
Representation
-
All algorithms have been boiled down to a common graph representation
-
Each algorithm is specified by a fixed number of “probes”.
-
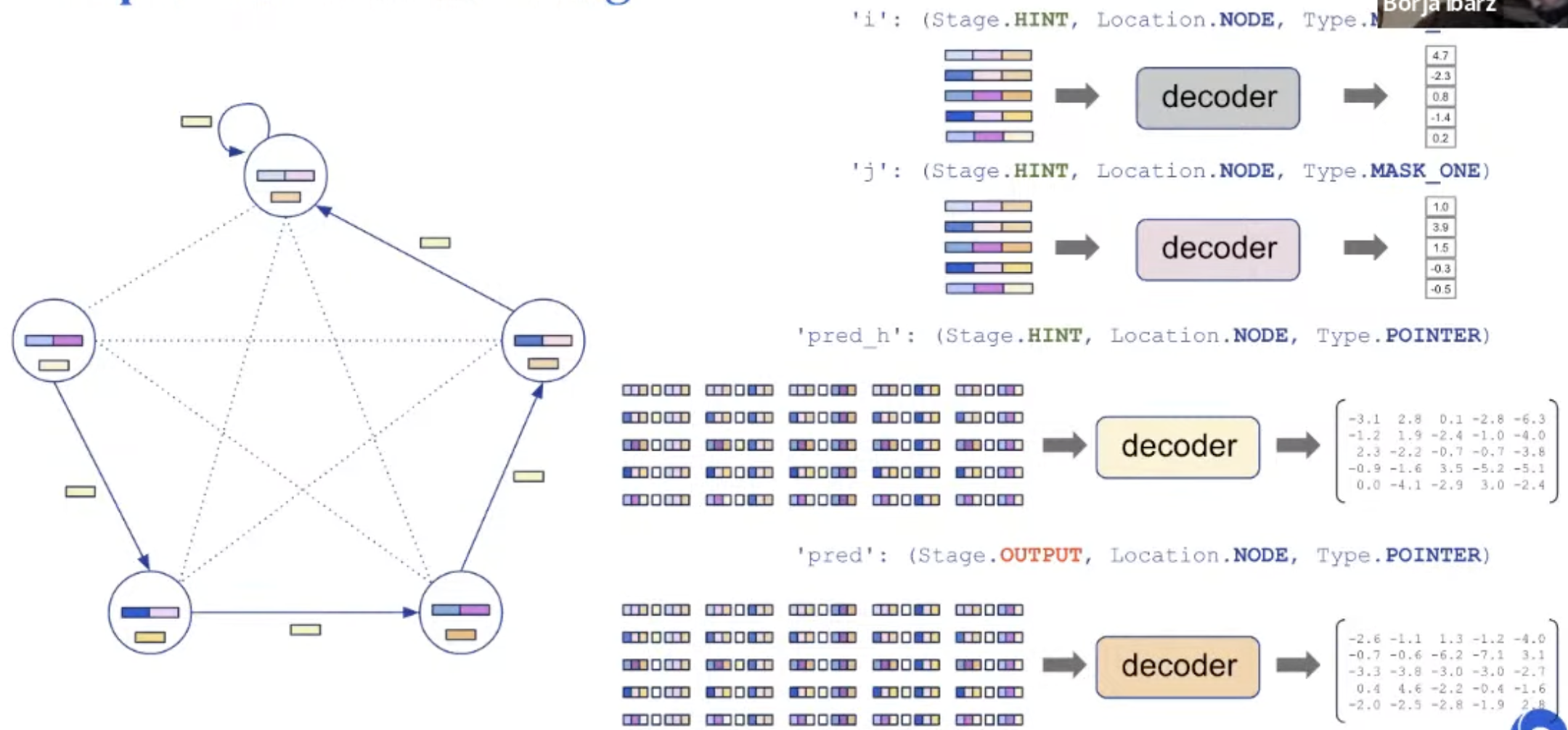
For example, the spec of insertion sort consists of the following 6 probes:
'pos': (Stage. INPUT, Location.NODE, Type.SCALAR)→ the id of each node'key': (Stage.INPUT, Location. NODE, Type.SCALAR)→ the values to sort'pred': (Stage.OUTPUT, Location. NODE, Type.POINTER)→ the final node order'pred h': (Stage. HINT, Location. NODE, Type. POINTER)→ the node order along execution'i': (Stage.HINT, Location.NODE, Type.MASK_ONE)→ index for insertion'j': (Stage.HINT, Location.NODE, Type.MASK_ONE)→ index tracking “sorted up to”
-
A probe can be input, output or hint.
-
The inputs and outputs are fixed during algorithm execution, the hints change during execution
→ they specify the algorithm (e.g., all sorting algorithms have the same inputs and outputs, differing only in their hints).
Representation: Encoding
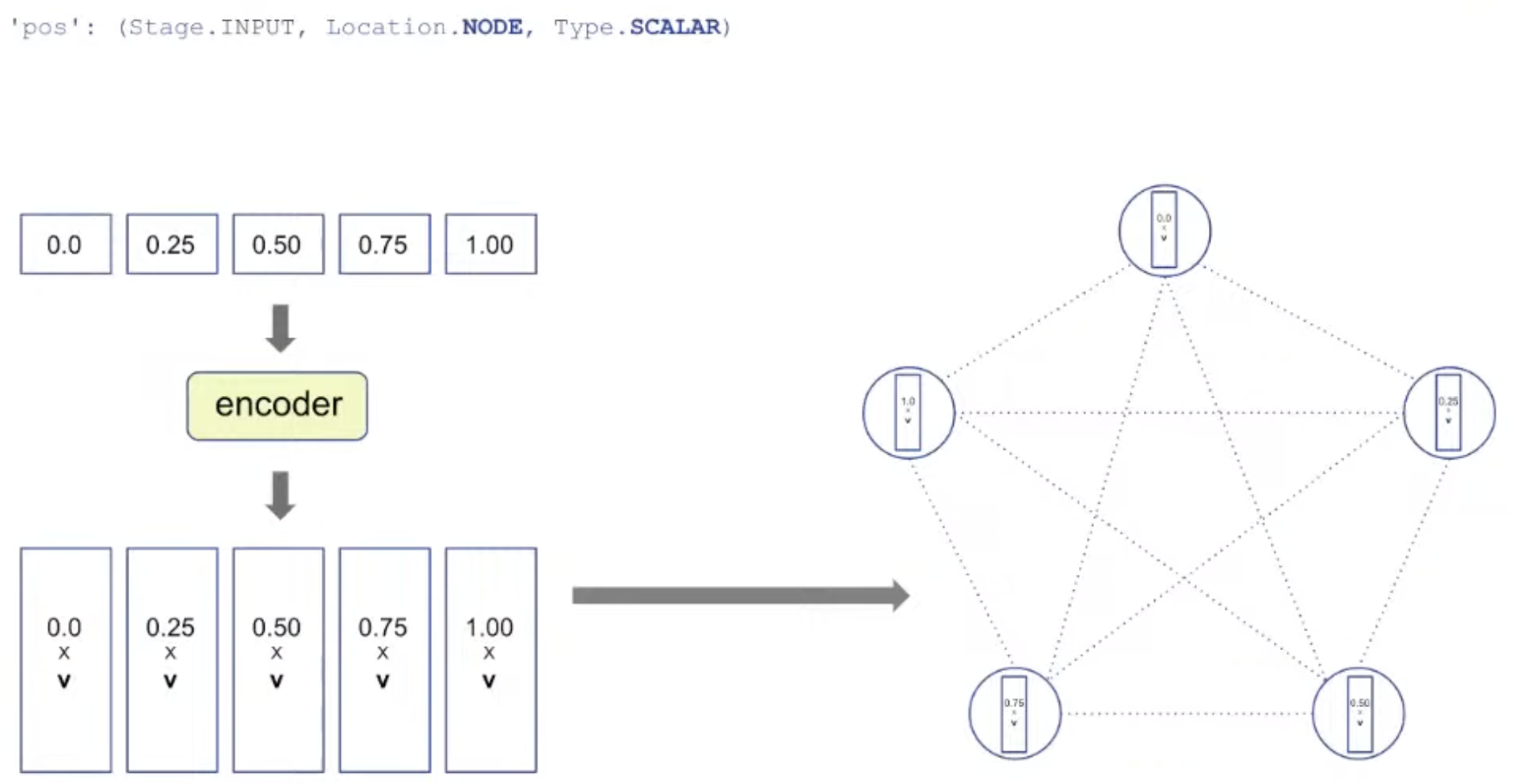
pos: Positional ID (ID of node) is encoded as vector by encoder.
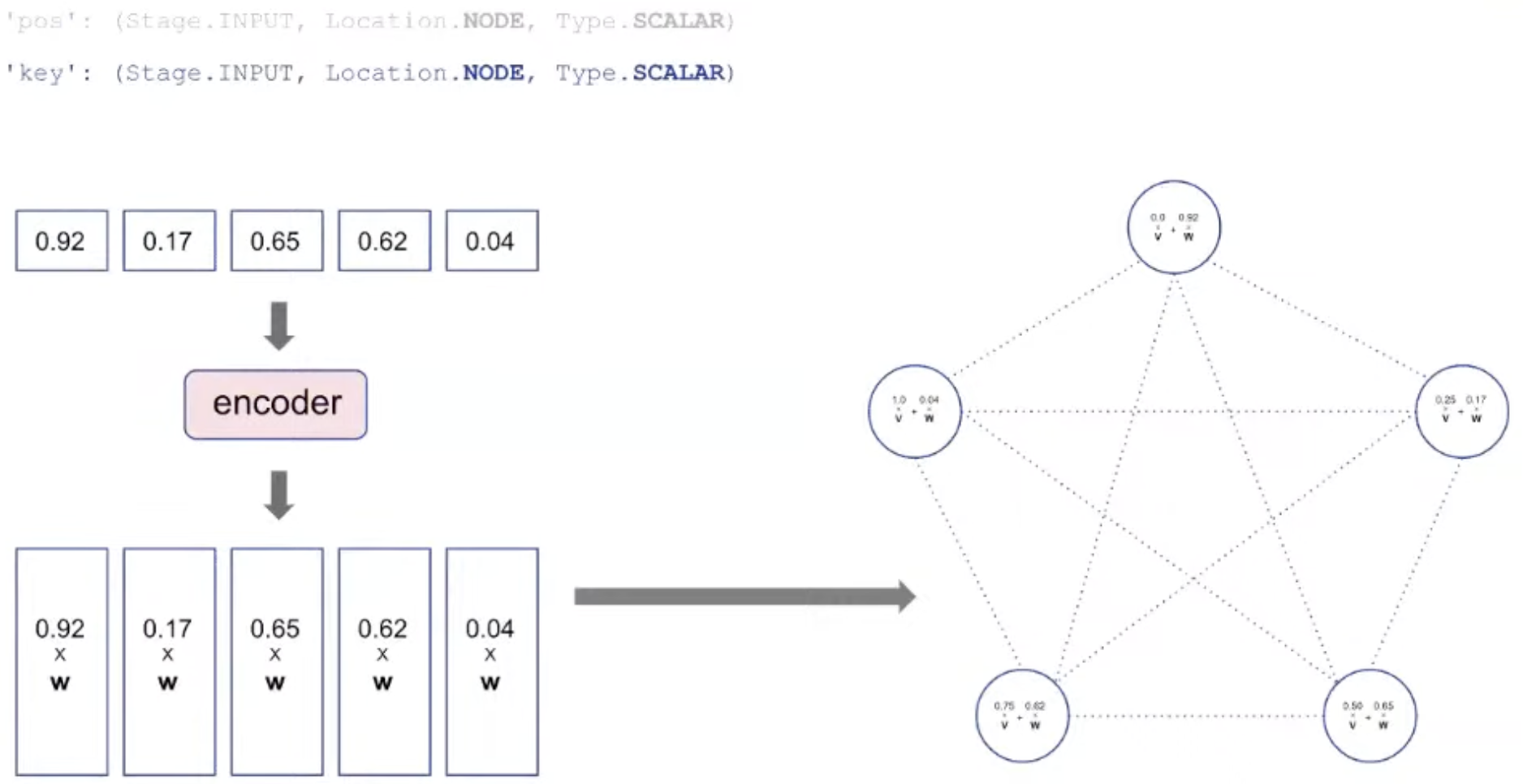
key: The value to be processed is also encoded as vector and added to pos.
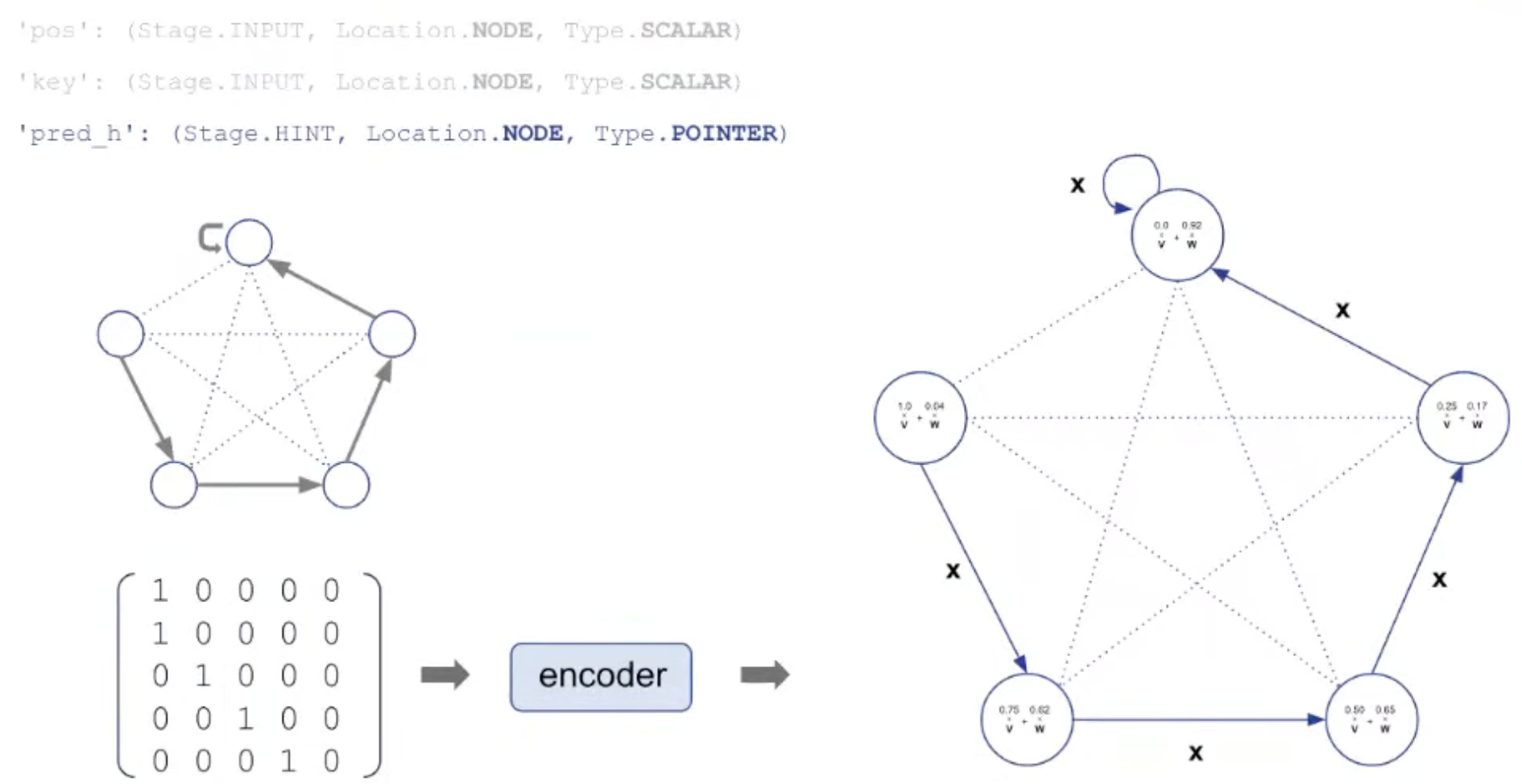
pred_h: pointer used as hint is encoded and used as edge embedding.
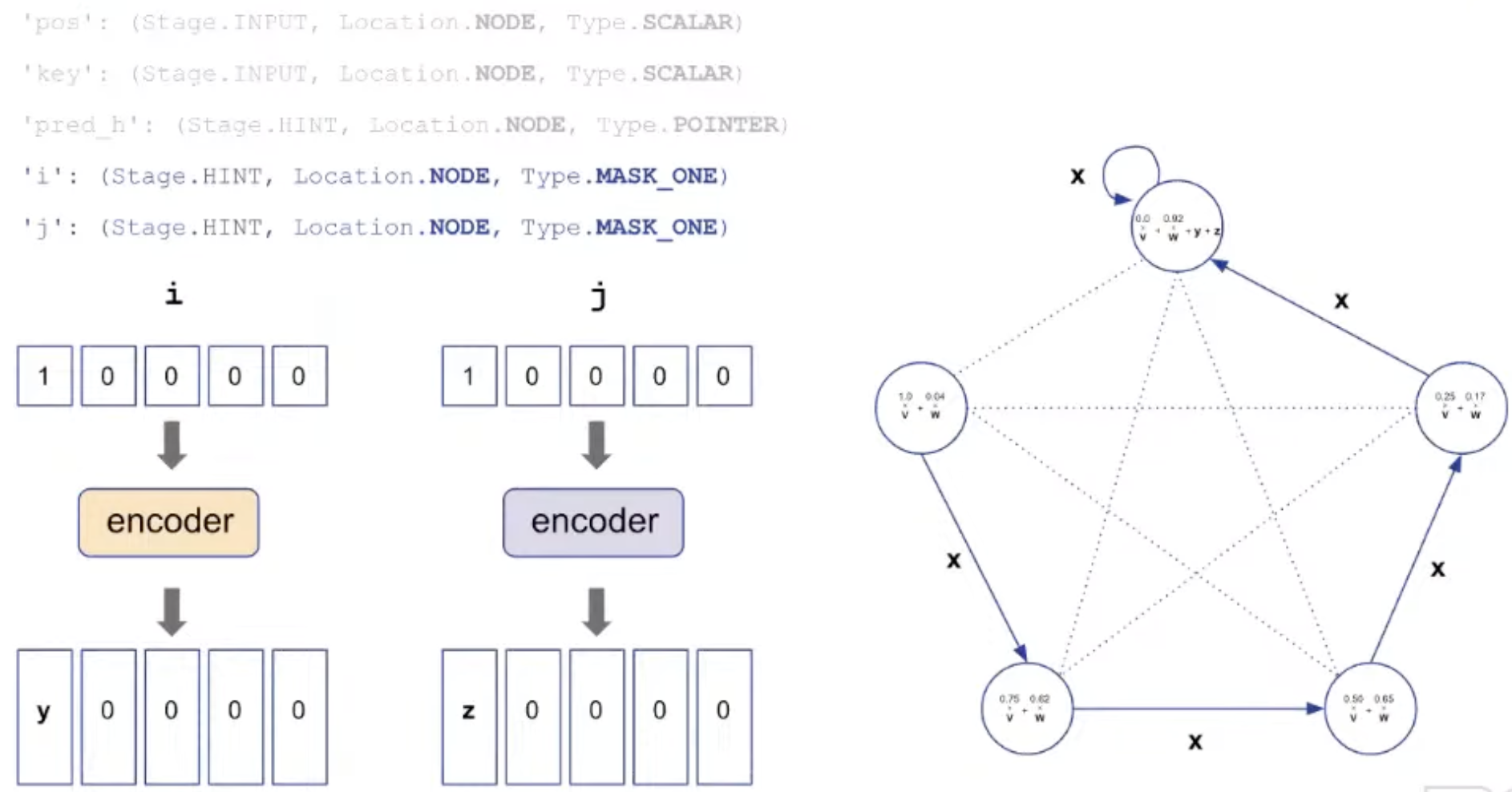
i, j: index needed for insertion are also added.
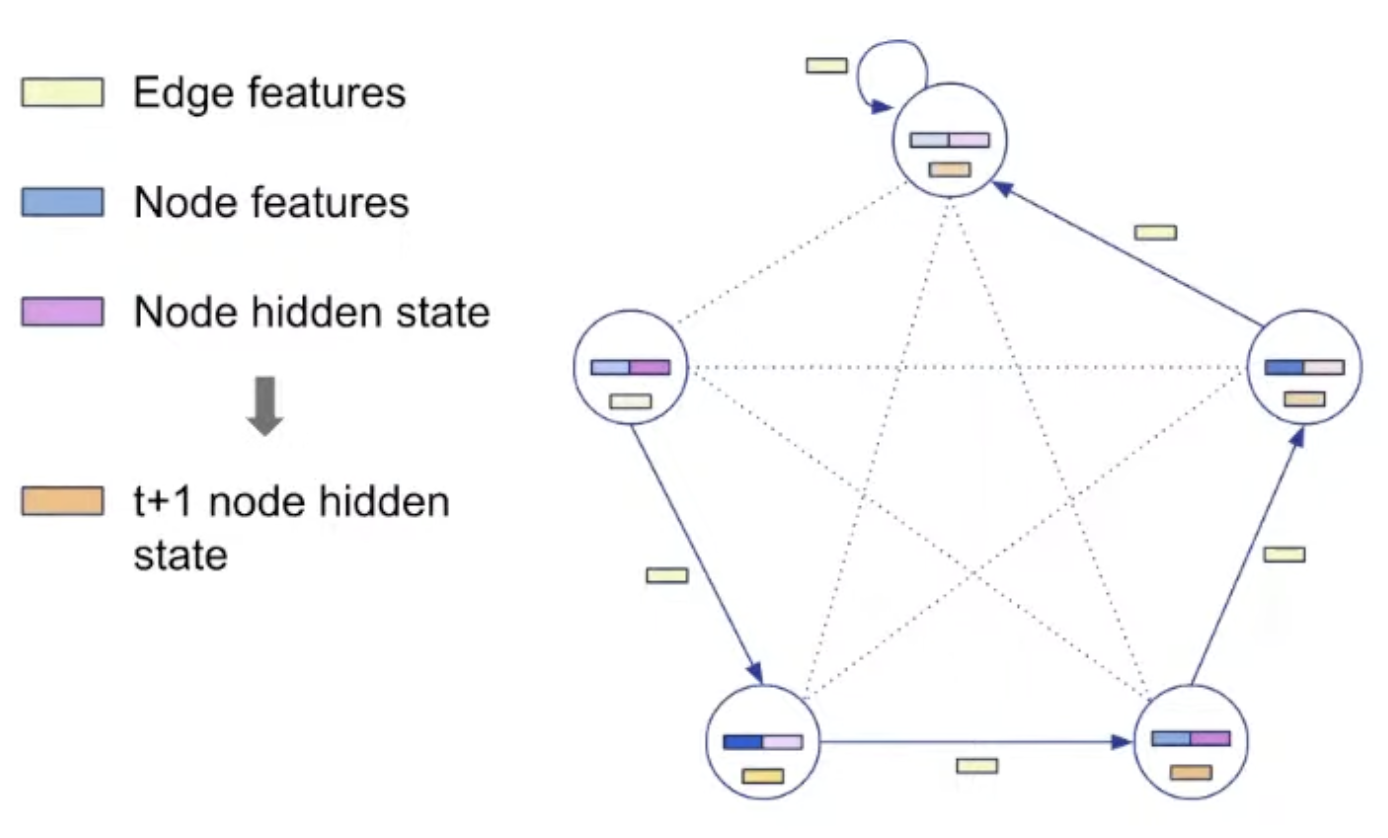
Representation: Decoding
Processing step is agnostic to the algorithm. Processing parameter is shared.
Training
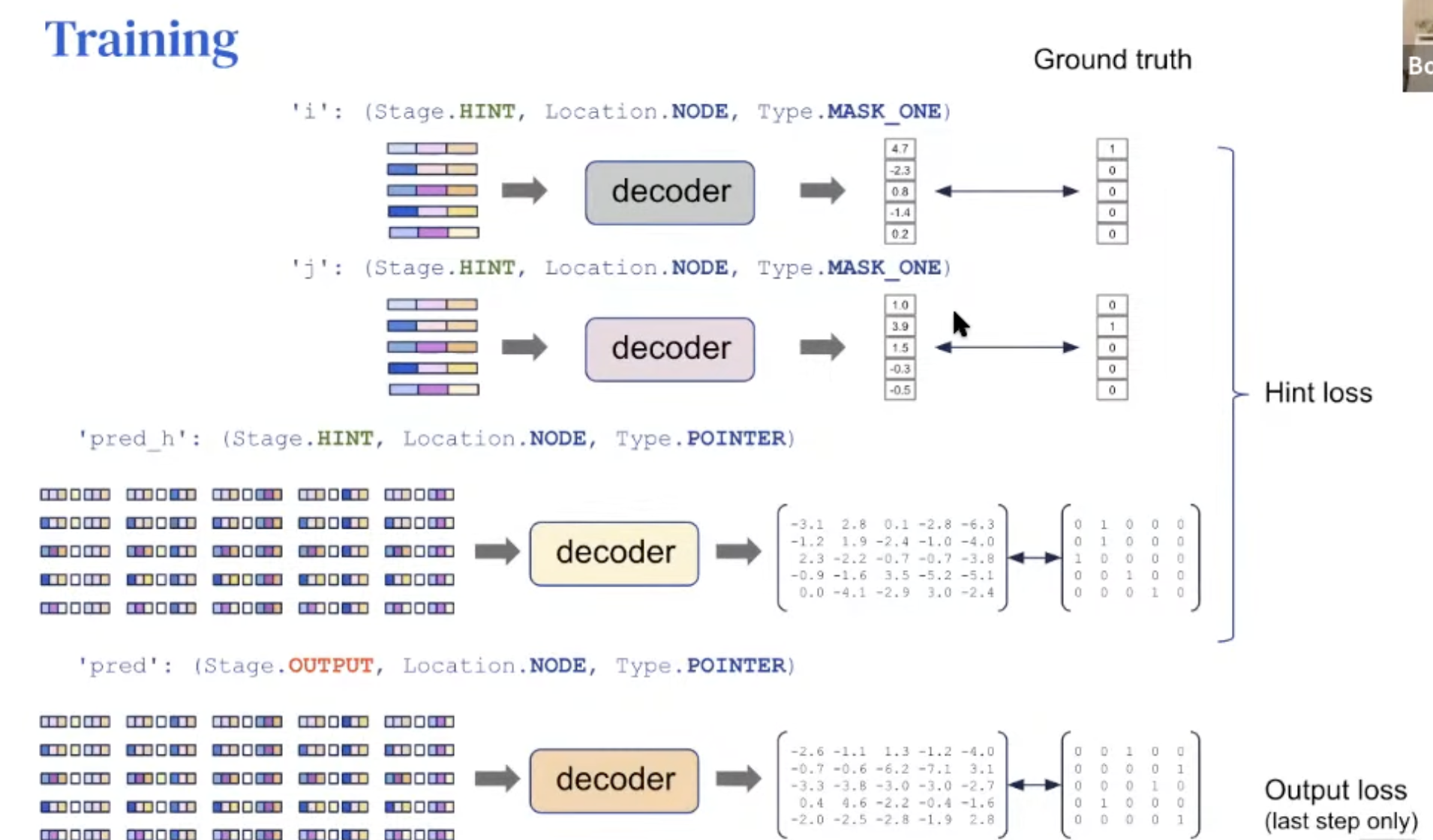
Hint: used only when training (not testing)
When training, hint loss is also added along with output loss.
Details
Trained on unlimited samples of size (number of nodes) < 16
The training distribution doesn’t cover all possible inputs though (e.g., we use only Erdös-Rényi graphs)
Tested on samples of size 64.
The length of the trajectory is given → both at train & test time.
Early stopping based on in-distribution scores.
But.. why even care about building a generalist?
→ It is all about problem solving!
How do we solve problems?
-
Example: Route recommendation
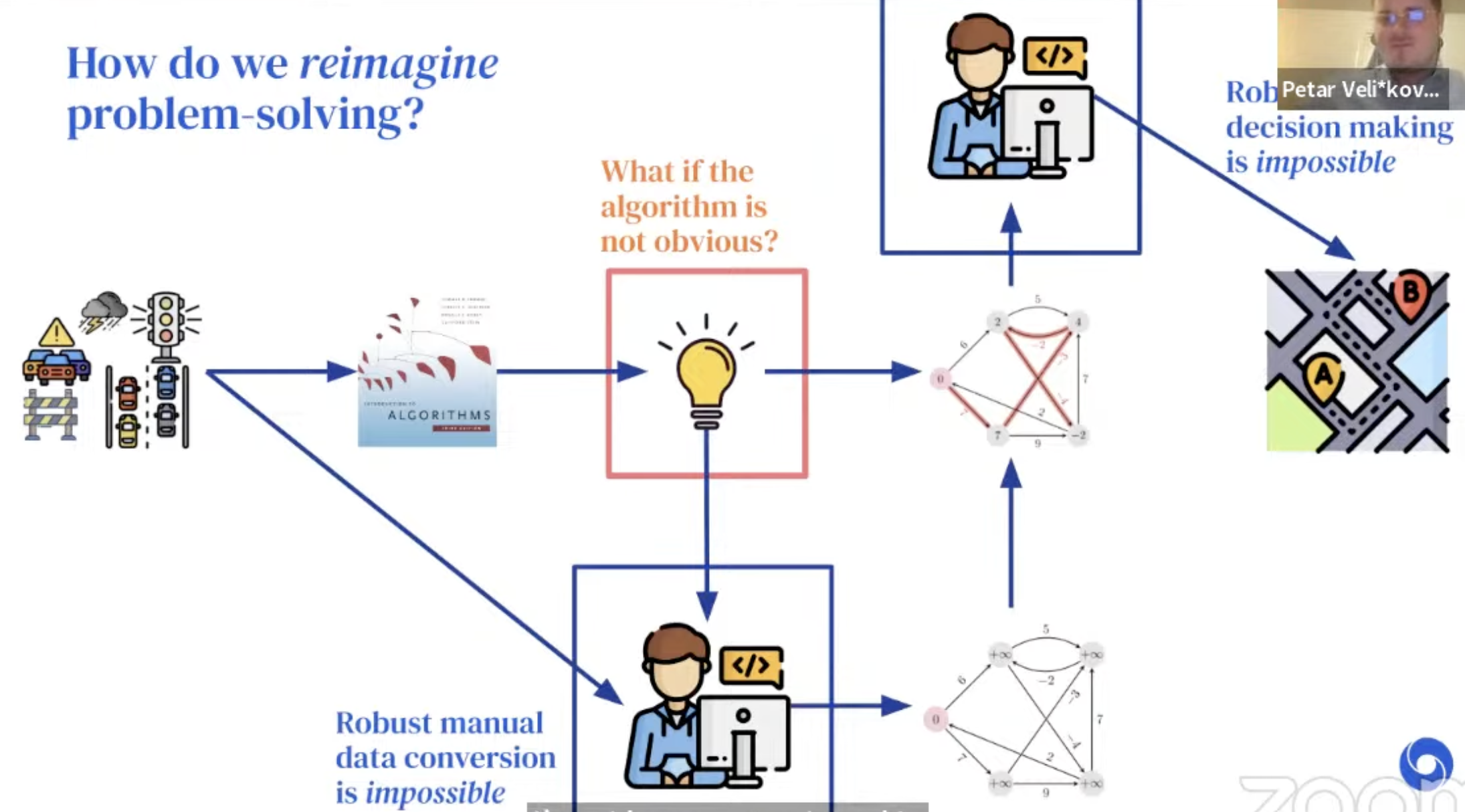
Details
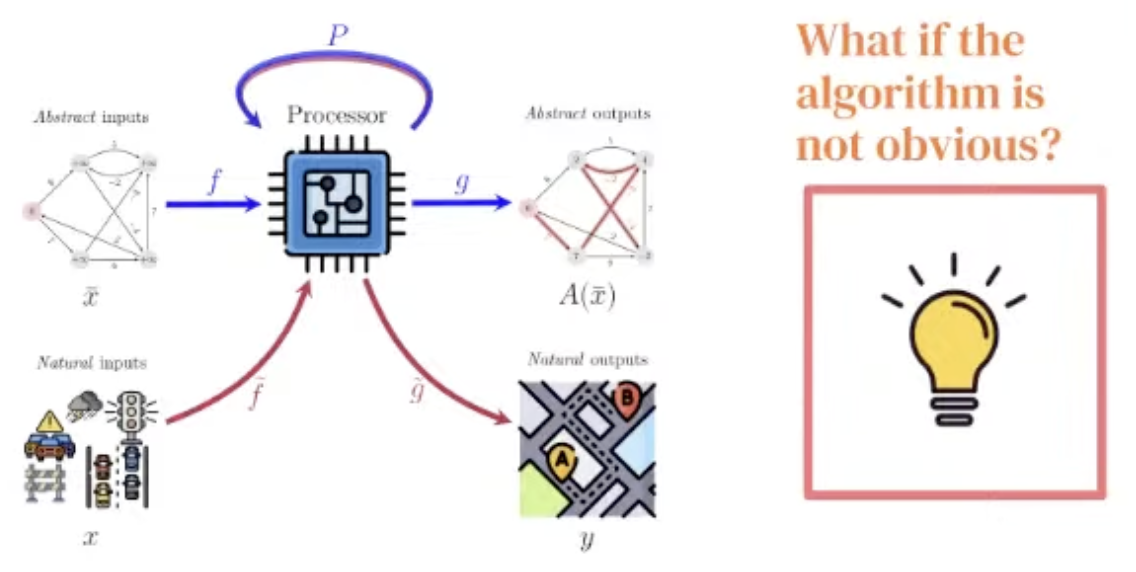
With Neural Algorithmic Reasoning, we break the blue bottleneck!
A generalist processor would break the red one!
- If the model have a shared latent space where all the “key” algorithms would be executed…
- No longer need to decide upfront which algorithm to use!
- The algorithm (combo) can be softly selected, learned by backprop through the encoder.
To get a generalist, first we need a good specialist
However, training a generalist is not as easy as simple training over all 30 algos in CLRS-30!
Initial runs of this kind led to NaNs.
Prior results, e.g. NE++ (Xhonneux et al., NeurIPS'21) imply this can be successful only if the algorithms being learnt together are highly related (e.g. Prim + Dijkstra)..
Key limitation:
Tasks with high learning instabilities cause breakages for all other.
→ Set out to improve single-task stability first!
Bucket list of improvements
Key improvements include:
-
Removing teacher forcing
-
Training data augmentation (e.g. sampling multiple sizes below 16)
-
Soft hint propagation (e.g. do not apply $\argmax$ to the hints; compute $\text{softmax}$ instead)
-
Static hint elimination (if a hint provably never changes, convert it to an input)
-
Encoder initialization (Xavier) + gradient clipping
-
Randomized positional embeddings
-
Permutation decoders using the Sinkhorn operator
-
Gating mechanisms in the processor
-
Triplet reasoning
$t_{ijk} = \psi_t (h_i, h_j, h_k, e_{ij}, e_{ik}, e_{kj}, g)$
$h_{ij} = \phi_t(\max_k t_{ijk})$
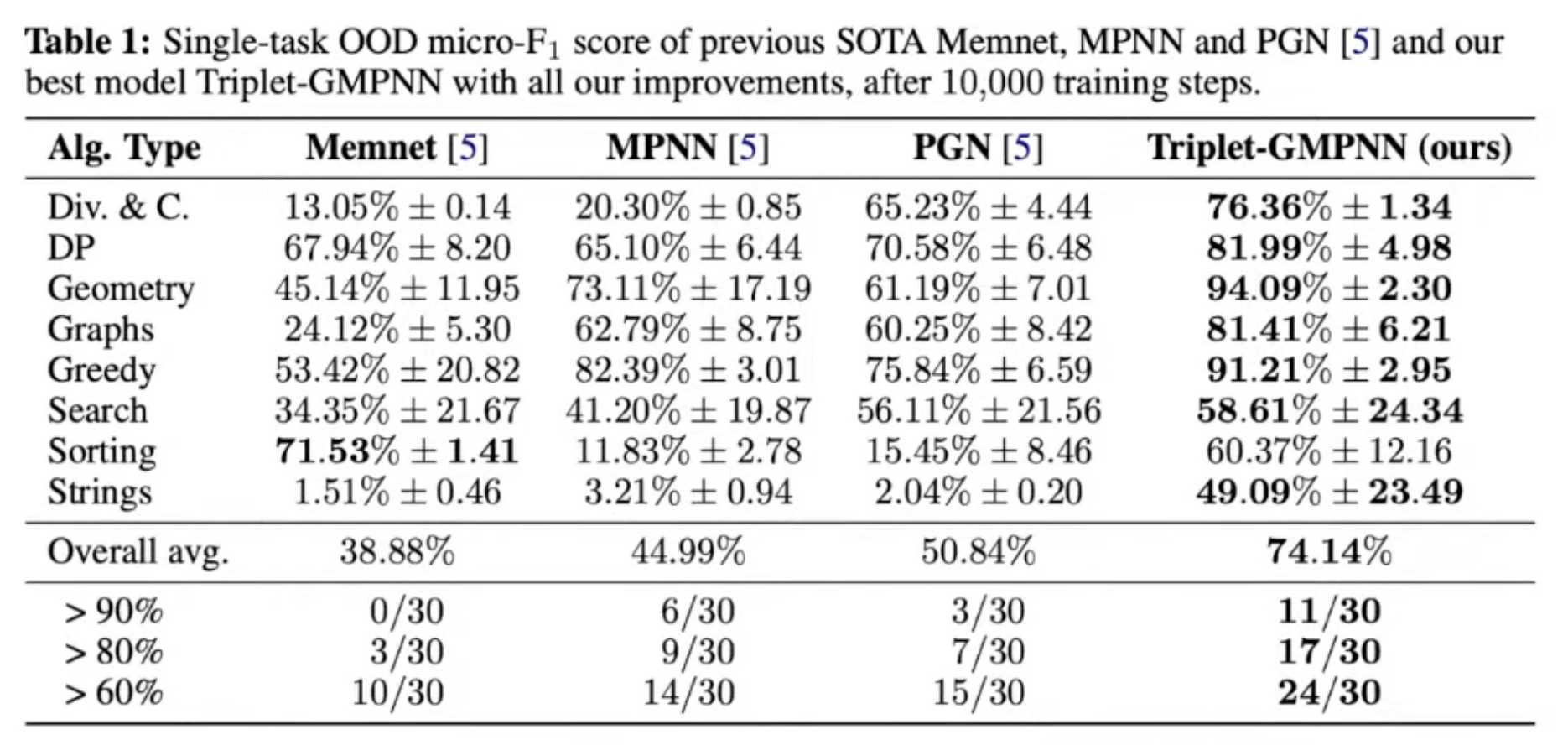
Results
Final step to the generalist: Chunking
The chunking mechanism was important for multi-task learning!
This not only helps protect against OOM issues, it also improves learning stability!
The idea is conceptually simple (though tricky to implement)
- The length of the trajectory is set to 16.
- Shorter samples are not padded, but concatenated by next sample.
i.e. if trajectory doesn’t fully fit in the chunk, this is OK-can restart from a midpoint hint.
Initialization of the hidden state should not matter, since CLRS-30 tasks are Markovian!
Single generalist that matches the thirty specialists
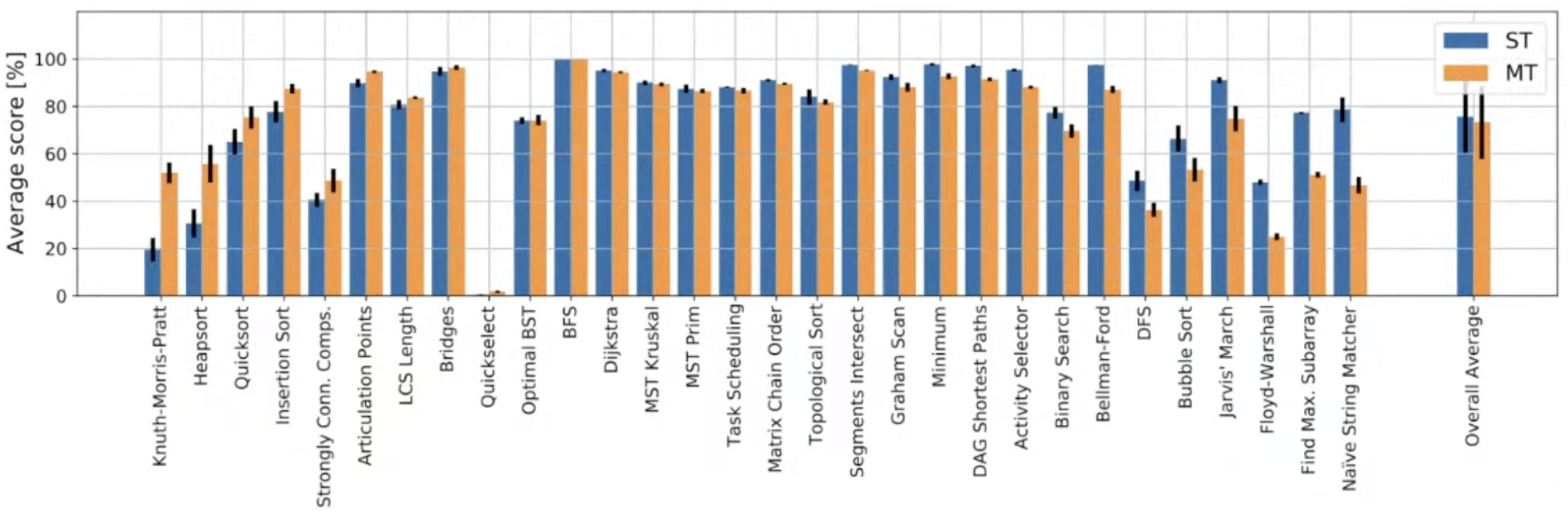
Chunking helps significantly