LoG, 22
A Generalist Neural Algorithmic Learner
Summary
- Neural network, 그 중에서도 GNN은 전통적인 컴퓨터과학 알고리즘(CLRS 책에 기재된)을 학습할 수 있다.
- 필요한 algorithm이 간단하지 않을 경우, generalist neural algorithmic learner가 필요하다.
- 안정적인 multi-task learning에 있어서 chunking mechanism이 중요했다.
Starting point: A benchmark to train neural computer scientists
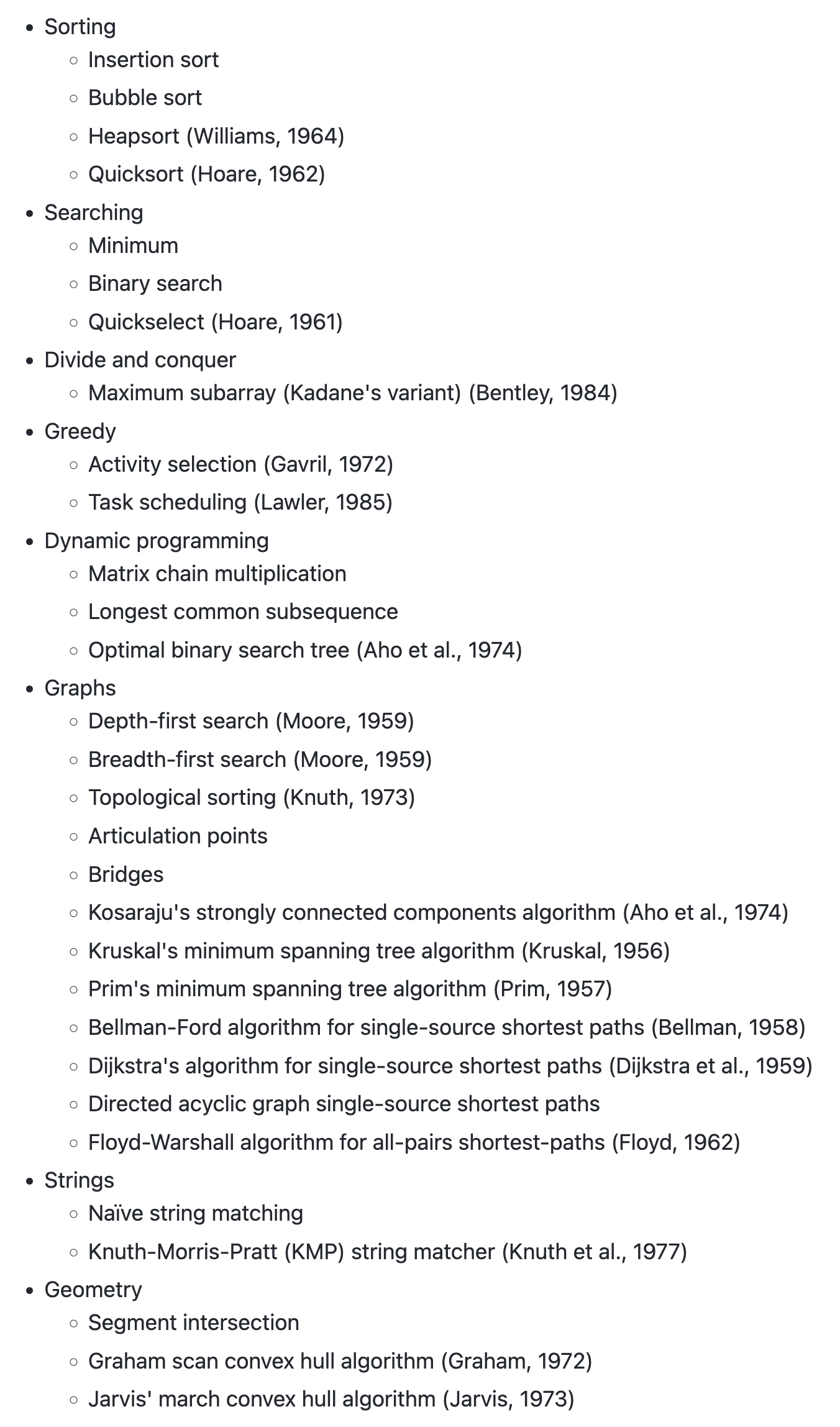
The CLRS Algorithmic Reasoning Benchmark
https://github.com/deepmind/clrs
- Neural network가 전통적인 CS algorithm을 풀도록 학습시킬 수 있을까?
- 이후에는 이 지식을 natural input에 적용해서 real-world problem을 풀 수 있을 것이다.
- 그리고, 그 algorithm을 여러 개 학습시킬 수 있을까?
- 이런 문제들은 recurrent architecture로 modeling 할 수 있다.
- LSTM, Transformer, ConvNet, GNN 등.
- 저자들은 GNN을 사용.
Benchmark: Introduction to Algorithms: CLRS
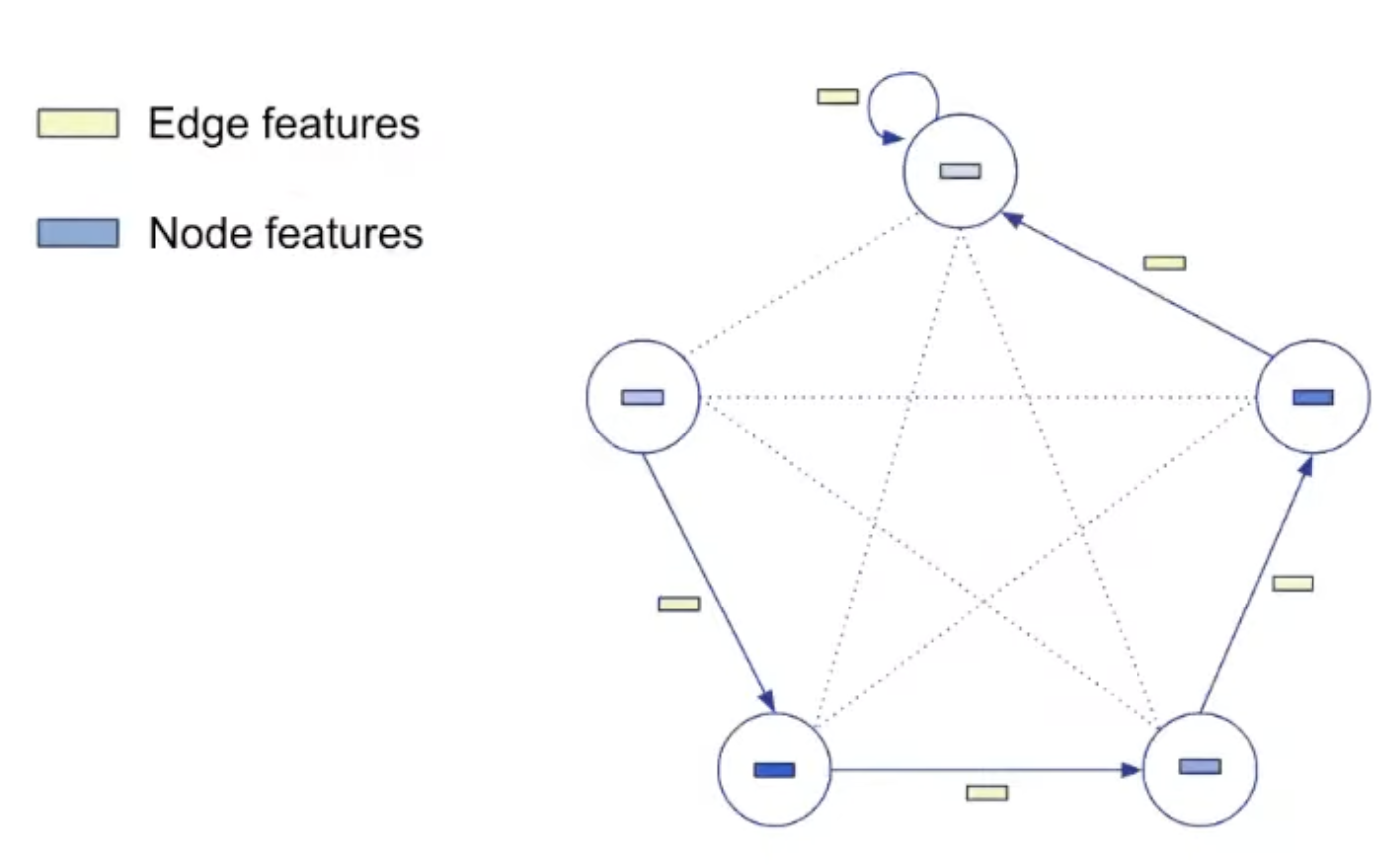
Representation
- 모든 알고리즘은 graph 형태로 표현되었다.
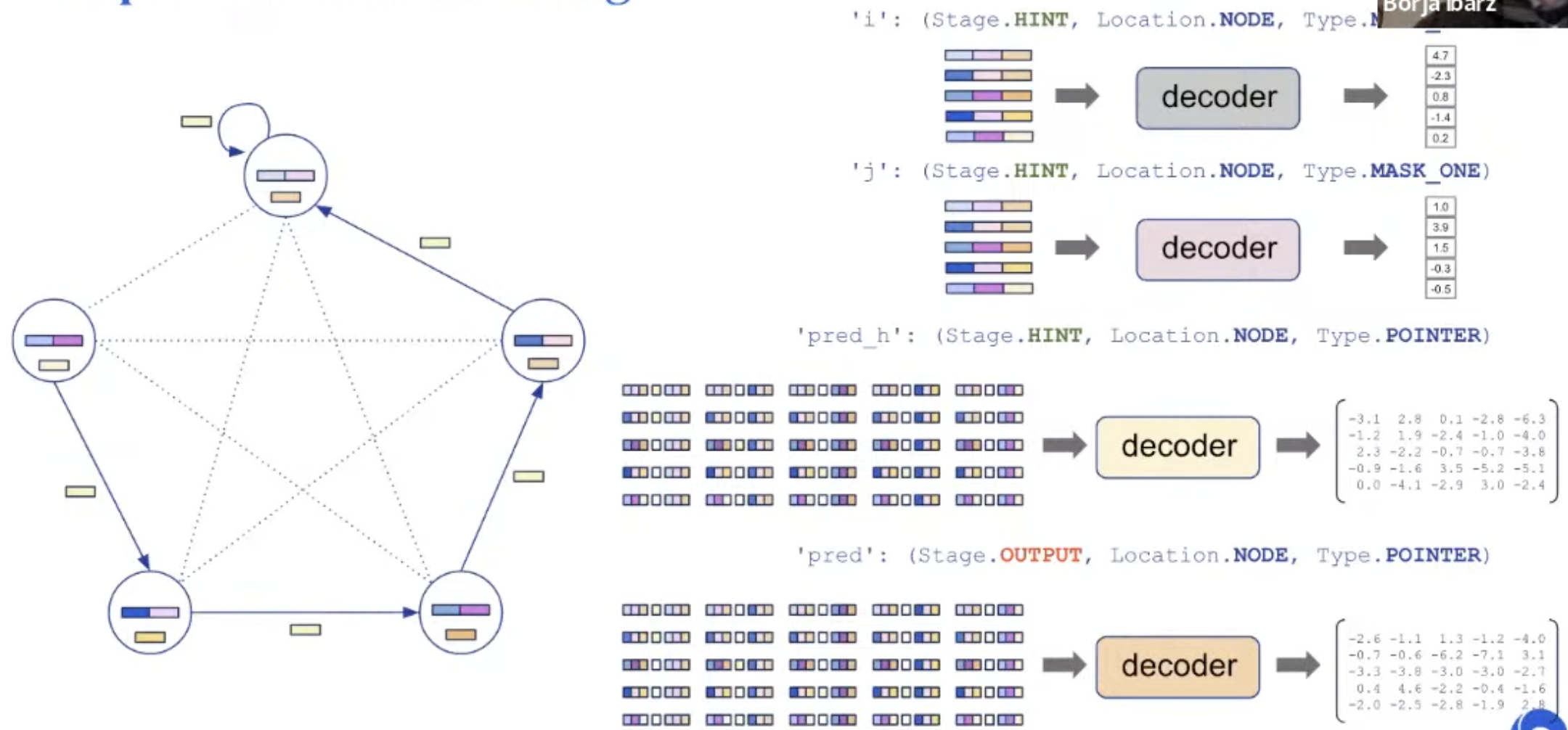
- 각 알고리즘은 정해진 숫자만큼의 “probe”로 표현된다.
- 예를 들어, insertion sort 알고리즘은 아래 6가지의 probe로 구성된다.
'pos': (Stage. INPUT, Location.NODE, Type.SCALAR)→ 각 node의 ID'key': (Stage.INPUT, Location. NODE, Type.SCALAR)→ 정렬할 value'pred': (Stage.OUTPUT, Location. NODE, Type.POINTER)→ 최종 node 순서'pred h': (Stage. HINT, Location. NODE, Type. POINTER)→ 실행하면서 바뀌는 node 순서'i': (Stage.HINT, Location.NODE, Type.MASK_ONE)→ insertion할 index'j': (Stage.HINT, Location.NODE, Type.MASK_ONE)→ tracking 할 index
- Probe는 input, output, hint 중 하나.
- Input과 output은 알고리즘 실행 시 고정, hint는 실행되면서 바뀜.
- 따라서, 모든 sorting algorithm은 input과 output이 같고 hint만 다름.
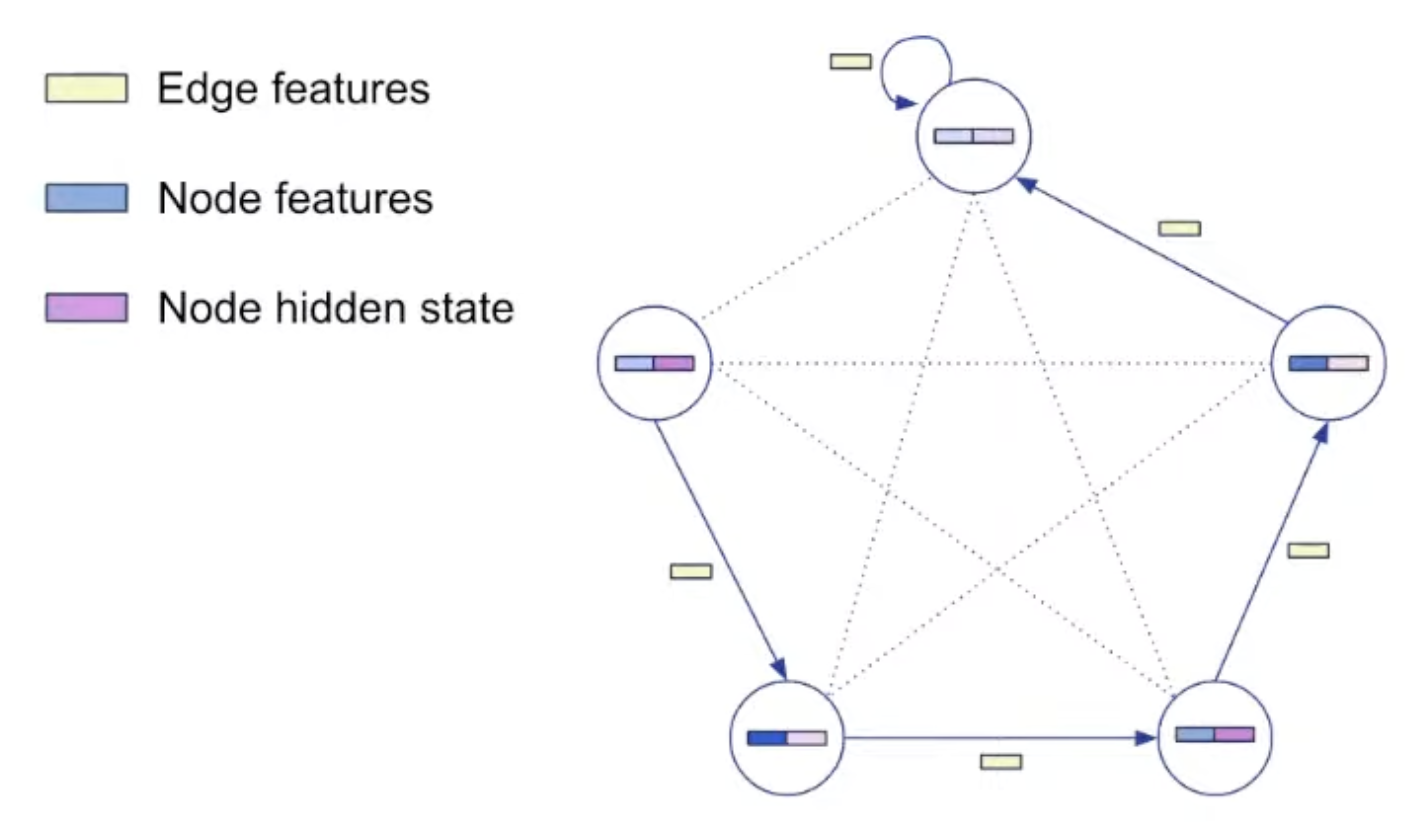
Representation: Encoding
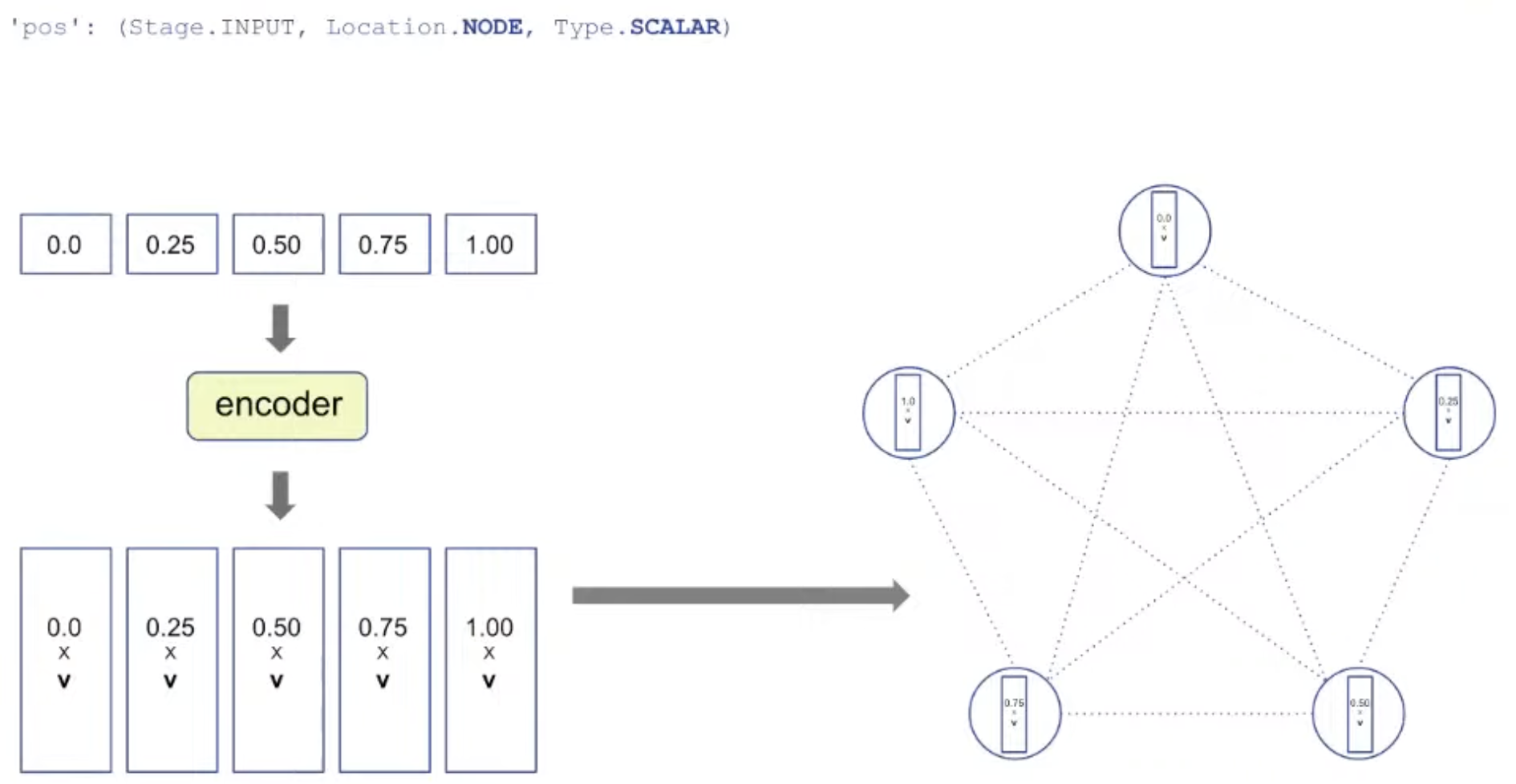
처음 positional ID (node의 ID)는 encoder에 의해 vector 형태로 표현됨.
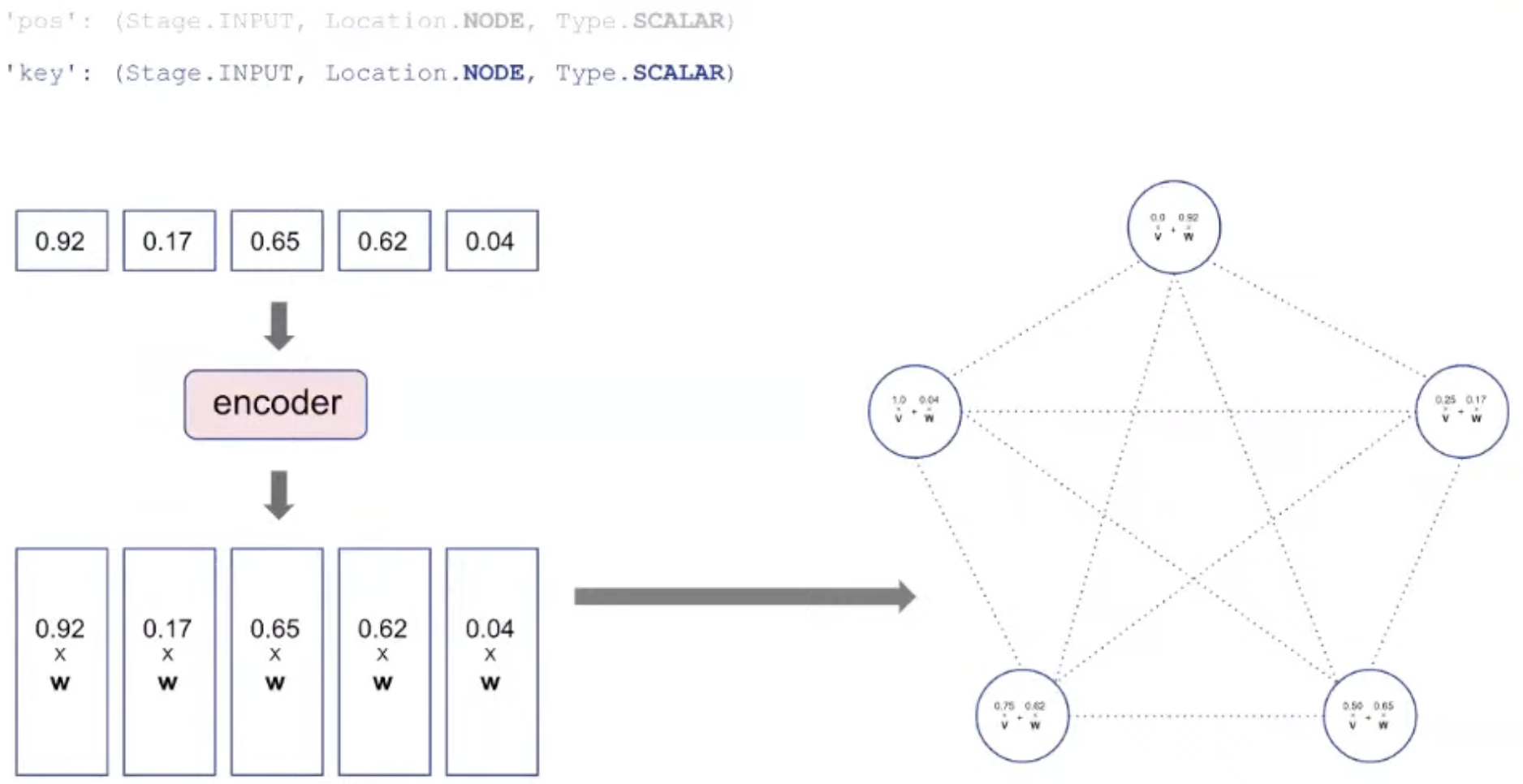
Algorithm의 대상이 되는 value도 encoder에 의해 vector 형태로 표현되고, pos에 더해짐.
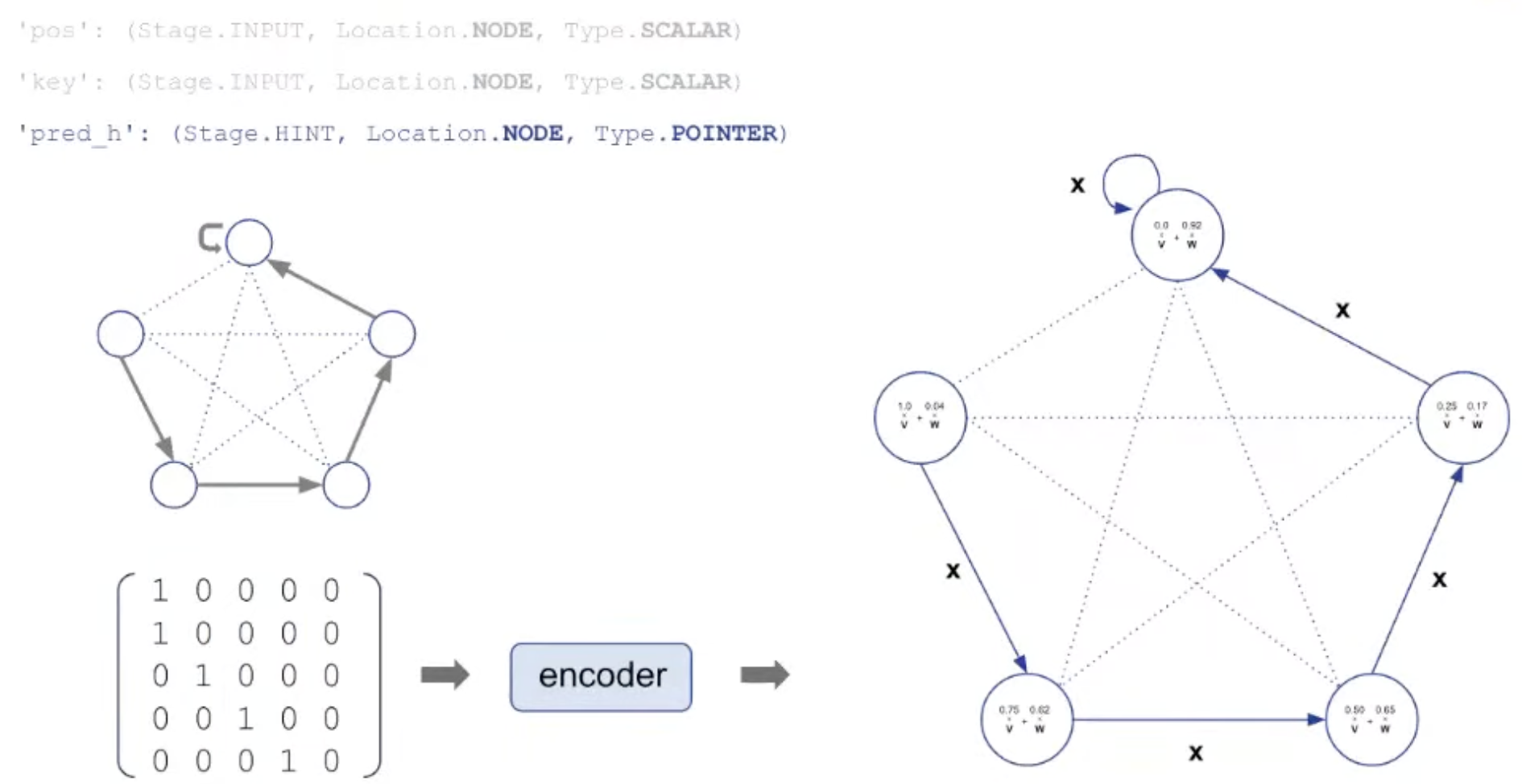
Hint로 사용되는 pred_h도 encoder에 의해 pointer로 mapping됨.
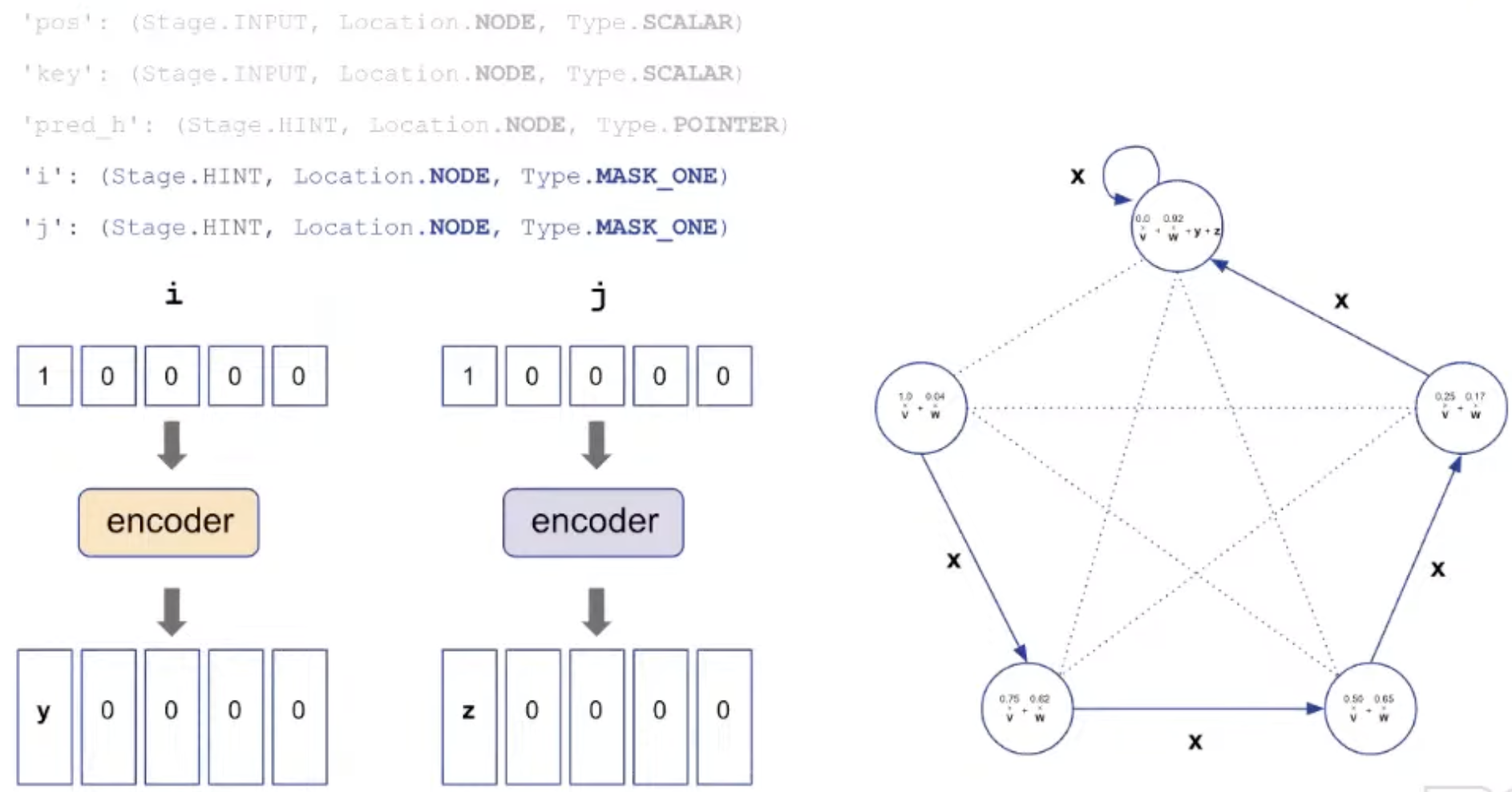
Insertion에 필요한 index도 encoder에 의해 바뀌어 더해짐.
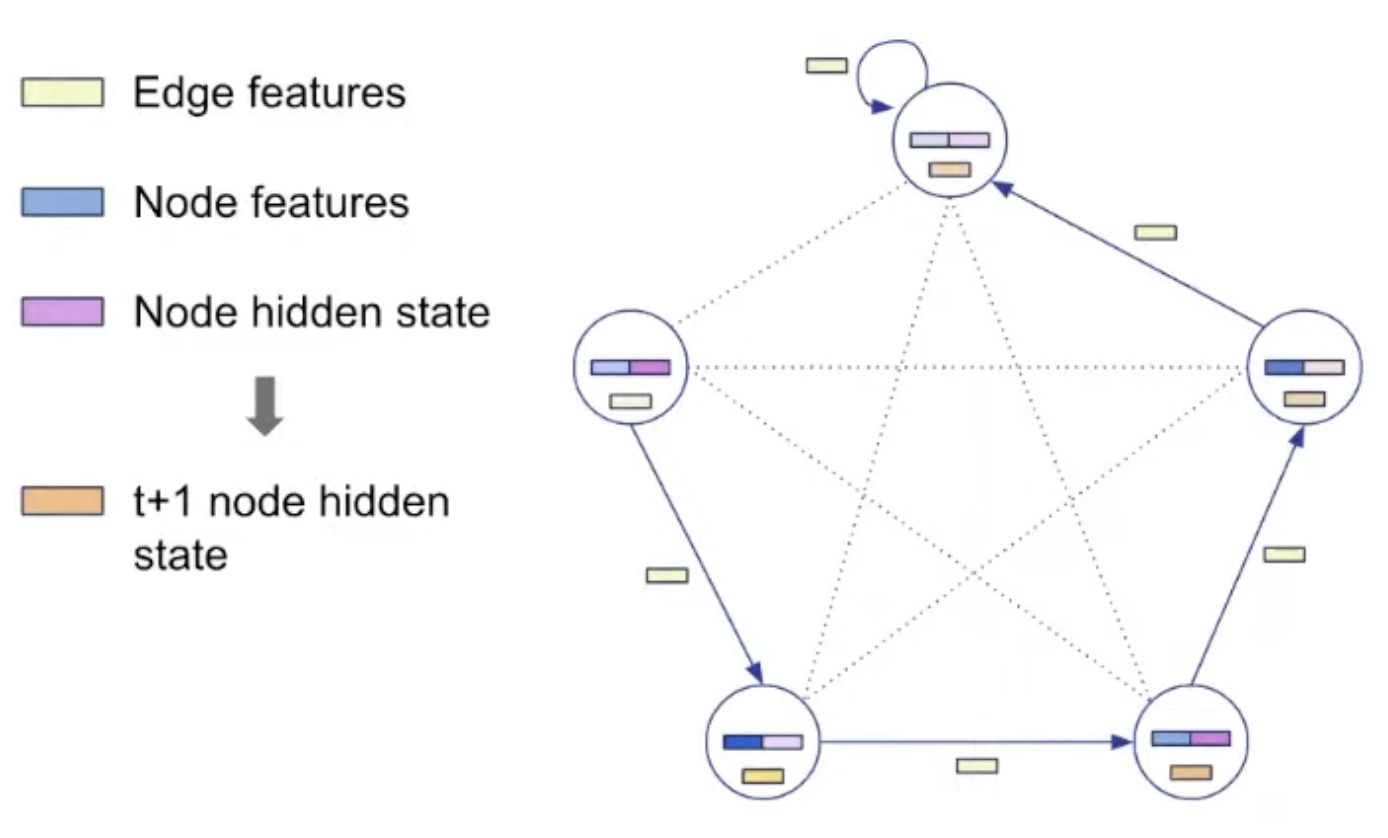
Representation: Decoding
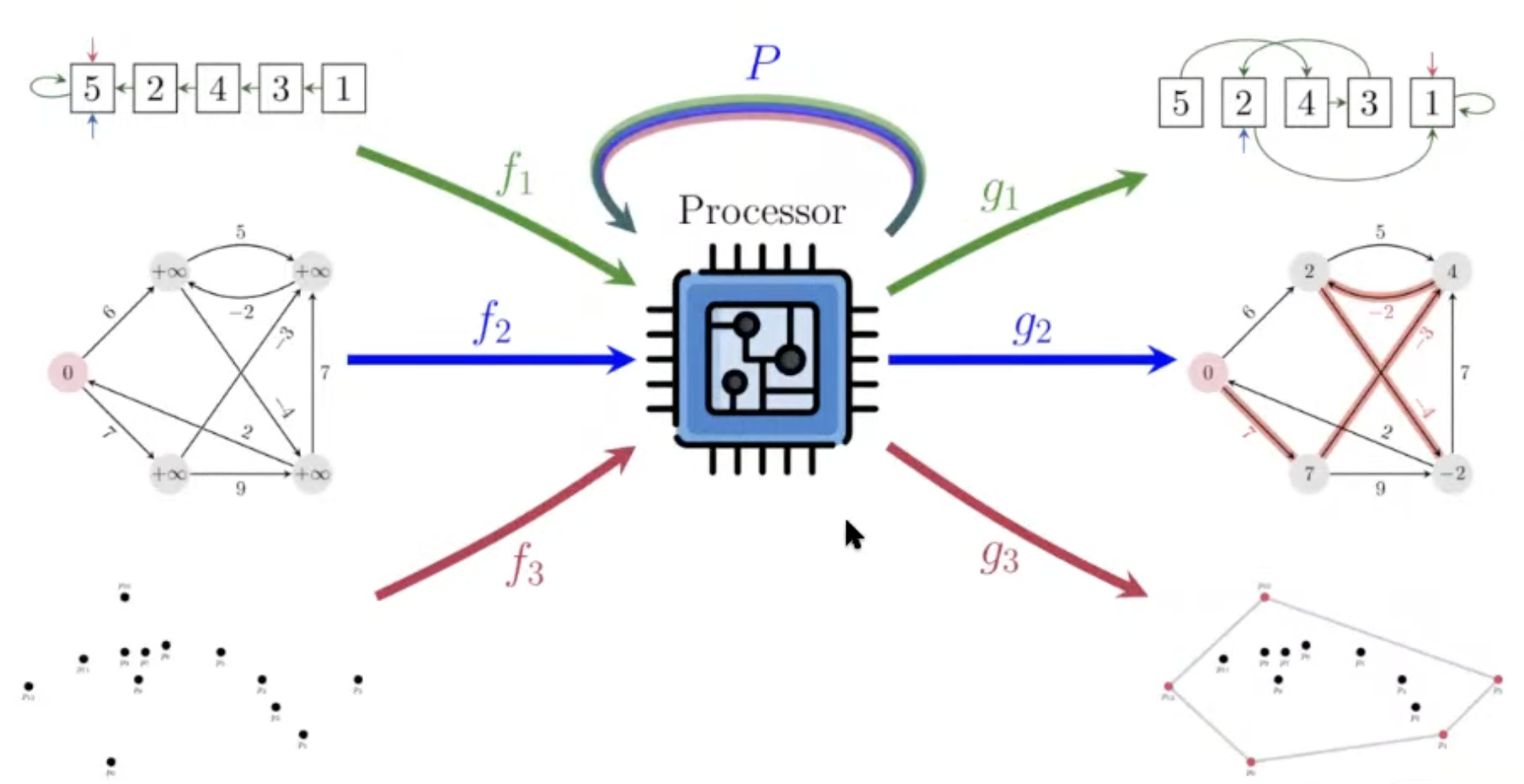
Processing step은 algorithm에 따라 바뀌지 않는다! Processing parameter는 공유됨.
Training
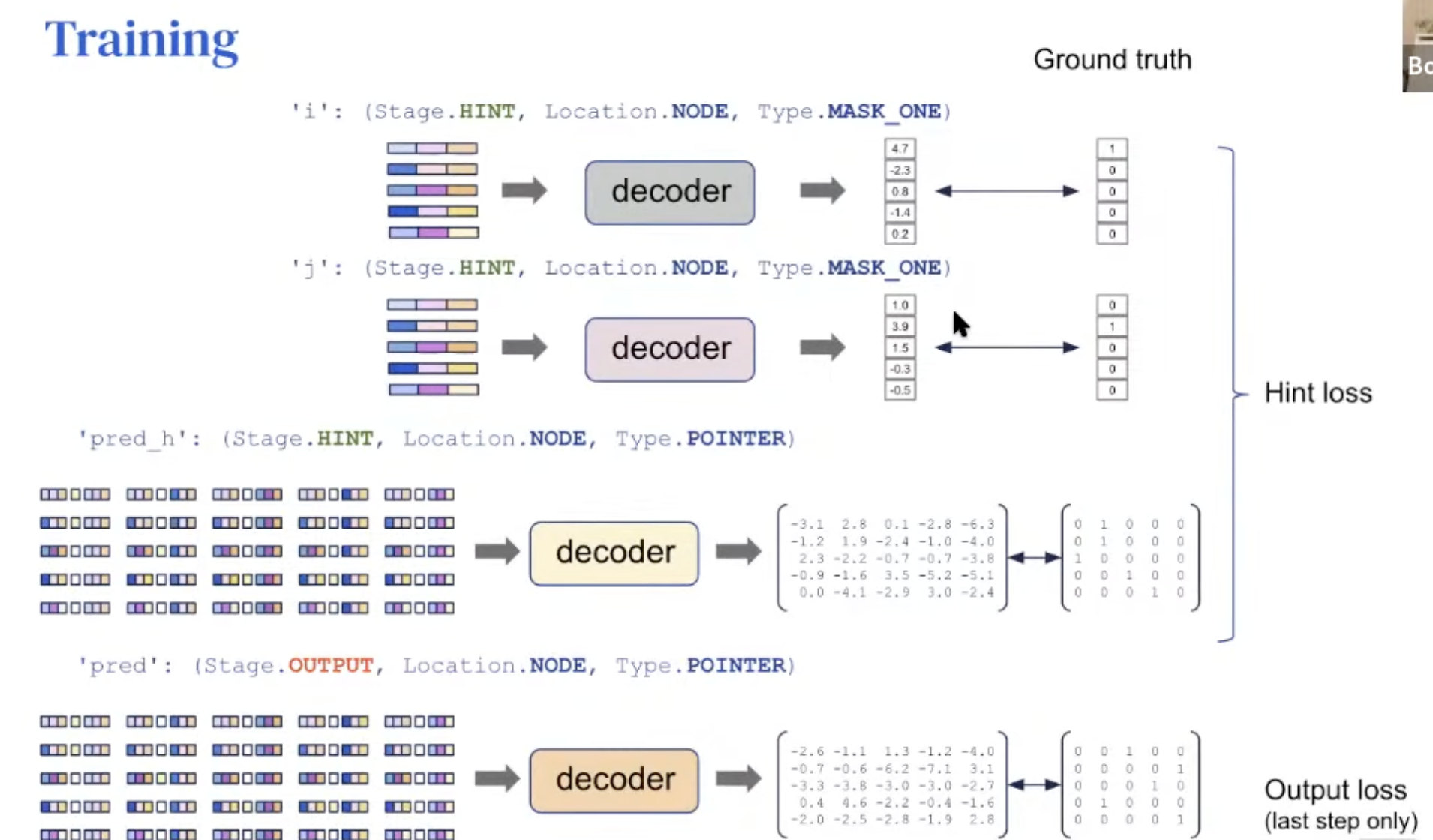
Train할 때는 hint를 사용하고, test할 때는 hint를 사용하지 않고 input만 주고 output을 맞춘다.
Train할 때는 output loss 뿐만 아니라 중간 과정인 hint loss에 대해서도 loss를 준다.
Details
몇 가지 training detail이 실제 학습에 매우 중요했다.
Node 개수가 16이하인 graph에 대해서 train하고, node 개수가 64인 sample에 대해 test 했다.
Train, test 시 모두 trajectory의 length도 정해져있다.
In-distribution score에 따라 early stopping을 적용했다.
Why even care about building a generalist?
왜 generalist algorithmic solver가 필요한 것일까?
어떤 input에 대해 output을 맞추는 것은 problem solving 인데, 우리가 보통 어떻게 real-world에서 문제를 해결하고 있는지 살펴보자.
-
Example: Route recommendation
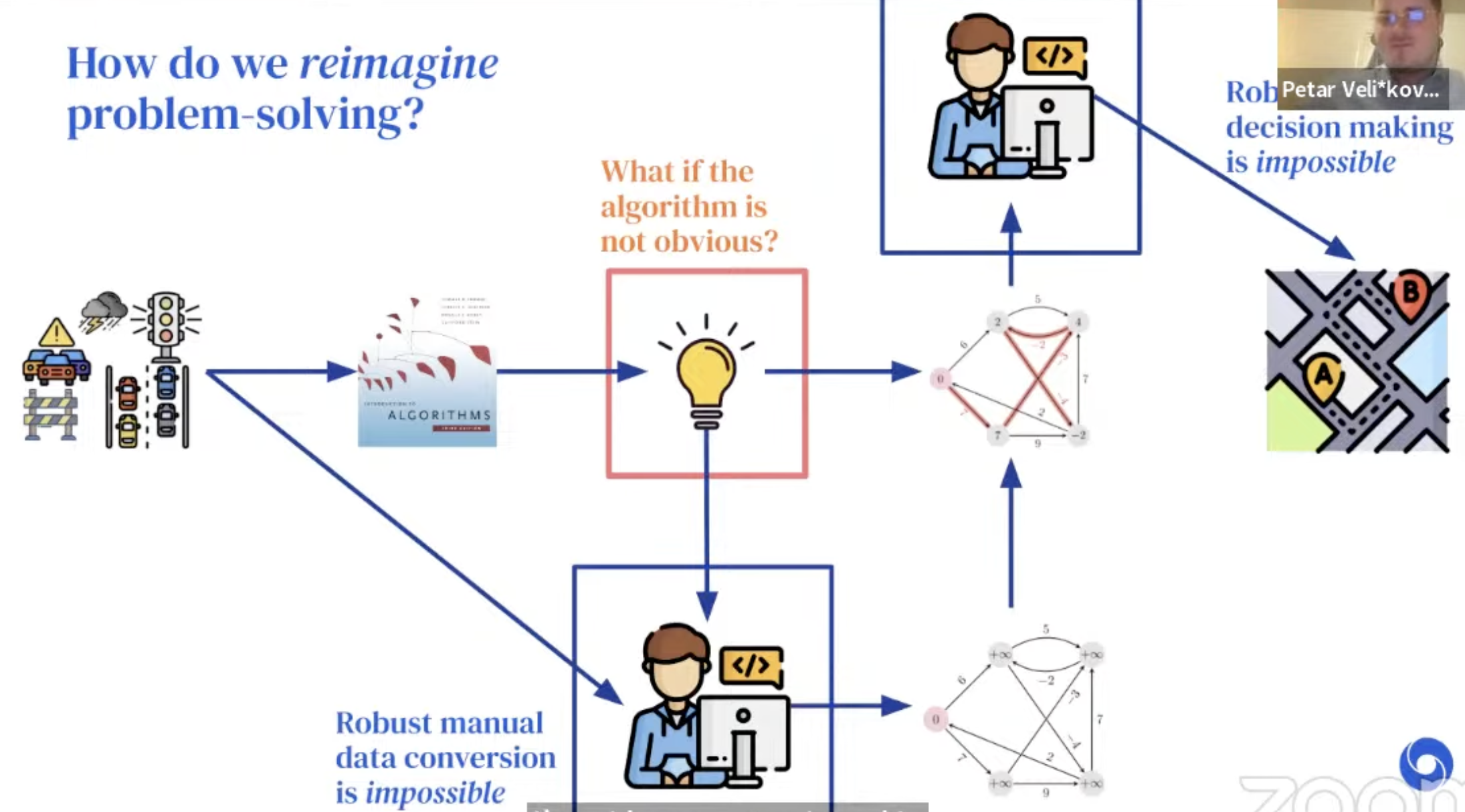
Google map에서 최적의 route 추천을 해야하는 상황을 가정해보자. 그냥 raw map 상태로는 문제를 풀 수 없다. Graph 형태로 문제를 추상화한다음, CLRS에서 공부했던 알고리즘을 적용해서, (아마 대부분 Dijkstra’s algorithm을 써서) 최단 거리를 알아내고, 그것을 정답으로 하여 raw map으로 다시 변환할 것이다.
하지만 real-world에서는 꼭 ‘최단거리’가 최적의 route는 아닐 수 있다. 교통상황, 높이, 등등 다양한 factor가 존재하고, 이럴 경우에는 algorithm이 obvious하지 않다.
Details
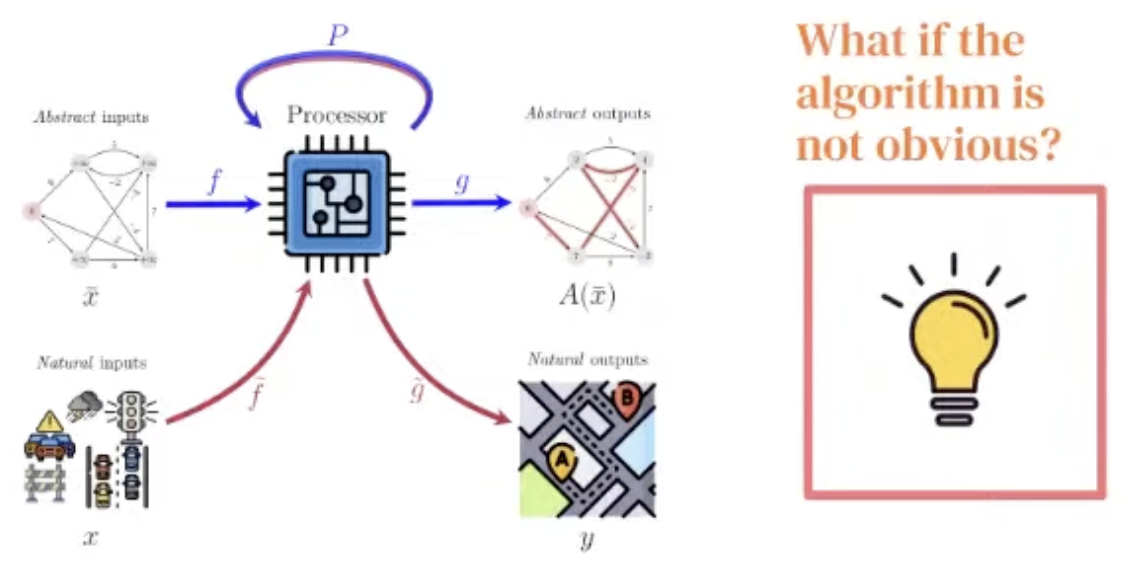
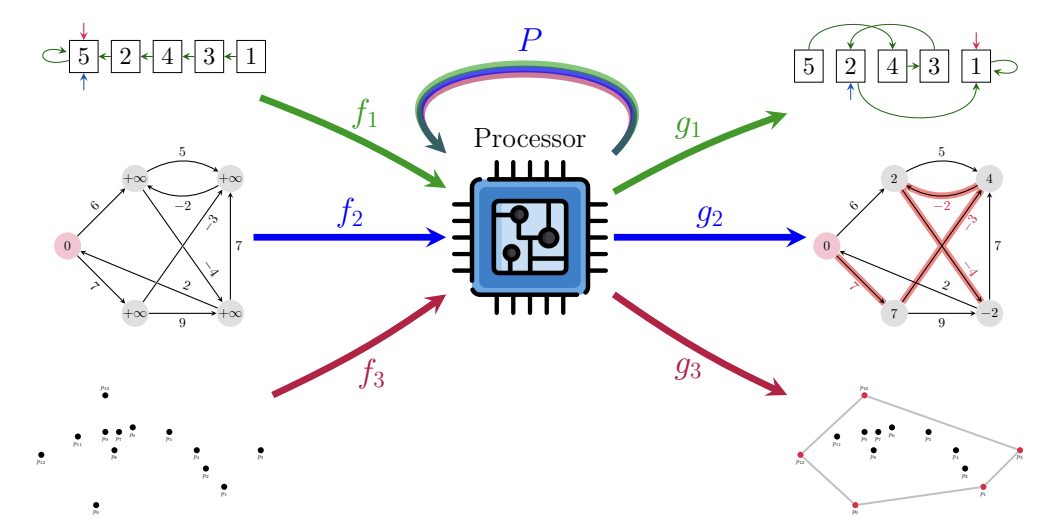
저자들은 neural algorithmic reasoning으로 파란 부분의 bottleneck을 해결할 수 있다고 주장한다.
그리고 잘 학습된 generalist processor가 빨간 bottleneck을 해결할 수 있다고 주장한다.
- 이 generalist processor는 중요한 알고리즘의 latent space를 잘 공유한다면, 더 이상 특정 알고리즘을 고르지 않아도 되고, 최적의 정답을 추천해줄 수 있을 것이다.
To get a generalist, first we need a good specialist!
그러나 CLRS의 30개의 알고리즘에 대해 모두 다 잘 하는 generalist를 naïve하게 학습하는 것은 어려웠다.
최근 NE++ (Xhonneux et al., NeurIPS'21) 에서, 이런 알고리즘들은 서로 연관이 높은 것들끼리 (e.g. Prim + Dijkstra) 학습될 때만 잘 학습된다는 얘기가 있었다.
DeepMind 저자들이 발견한 학습 양상:
학습이 불안정한 task 들은 다른 task에도 크게 영향을 준다.
따라서, single-task 단위로 안정성을 먼저 높여 놓아야 한다.
Bucket list of improvements
-
Teacher forcing 없애기
-
Training data augmentation (16개 이하의 node size 기준)
-
Soft hint propagation (hint에 대해 argmax를 취하지 않고, softmax를 취한다)
-
Static hint elimination (hint가 바뀌지 않으면, input으로 사용한다)
-
Encoder initialization (Xavier) + Gradient clipping
-
Randomized positional embedding
-
Sinkhorn operator를 사용한 Permutation decoder
-
Processor에 gating mechanism
-
Triplet reasoning
$t_{ijk} = \psi_t (h_i, h_j, h_k, e_{ij}, e_{ik}, e_{kj}, g)$
$h_{ij} = \phi_t(\max_k t_{ijk})$
Results
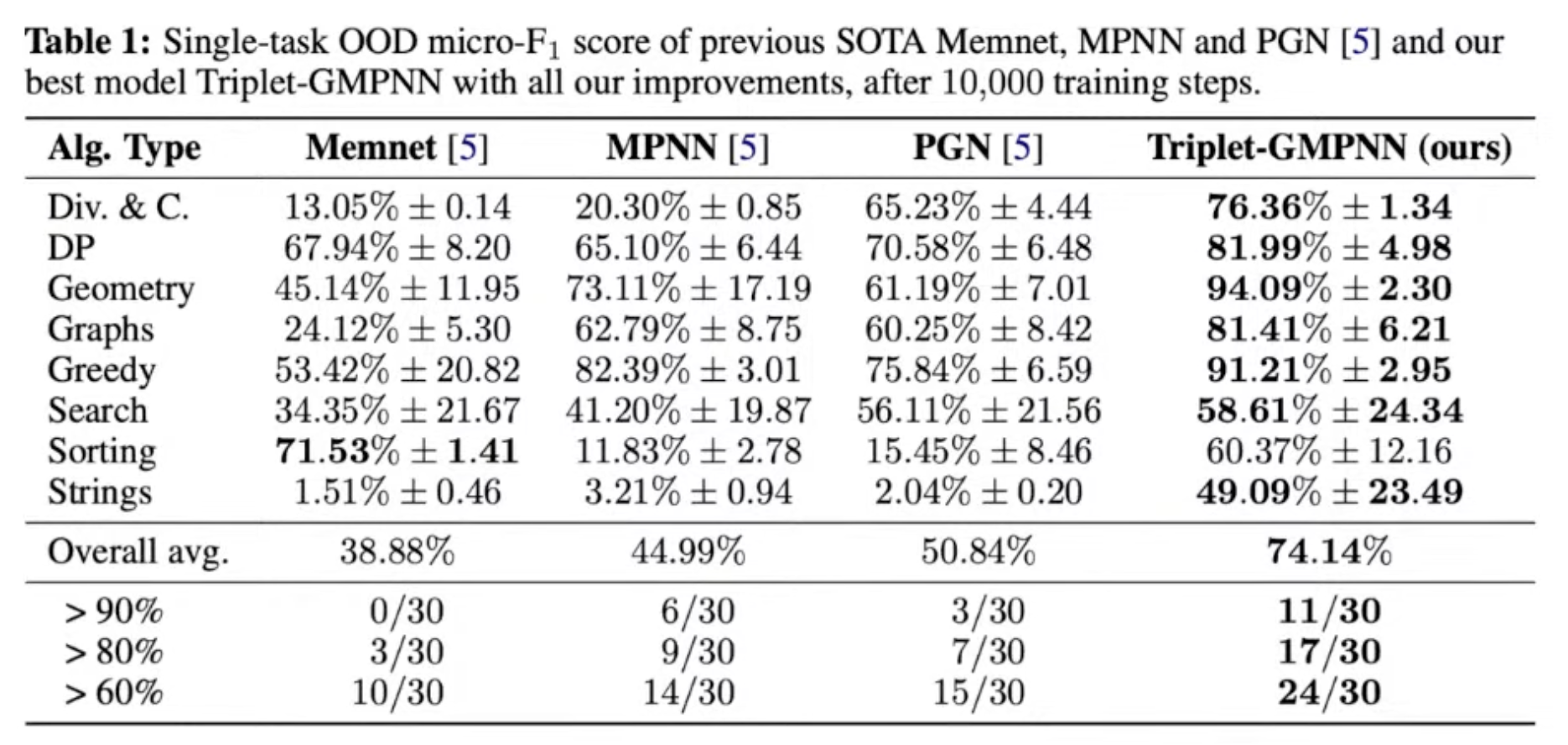
Final step to the generalist
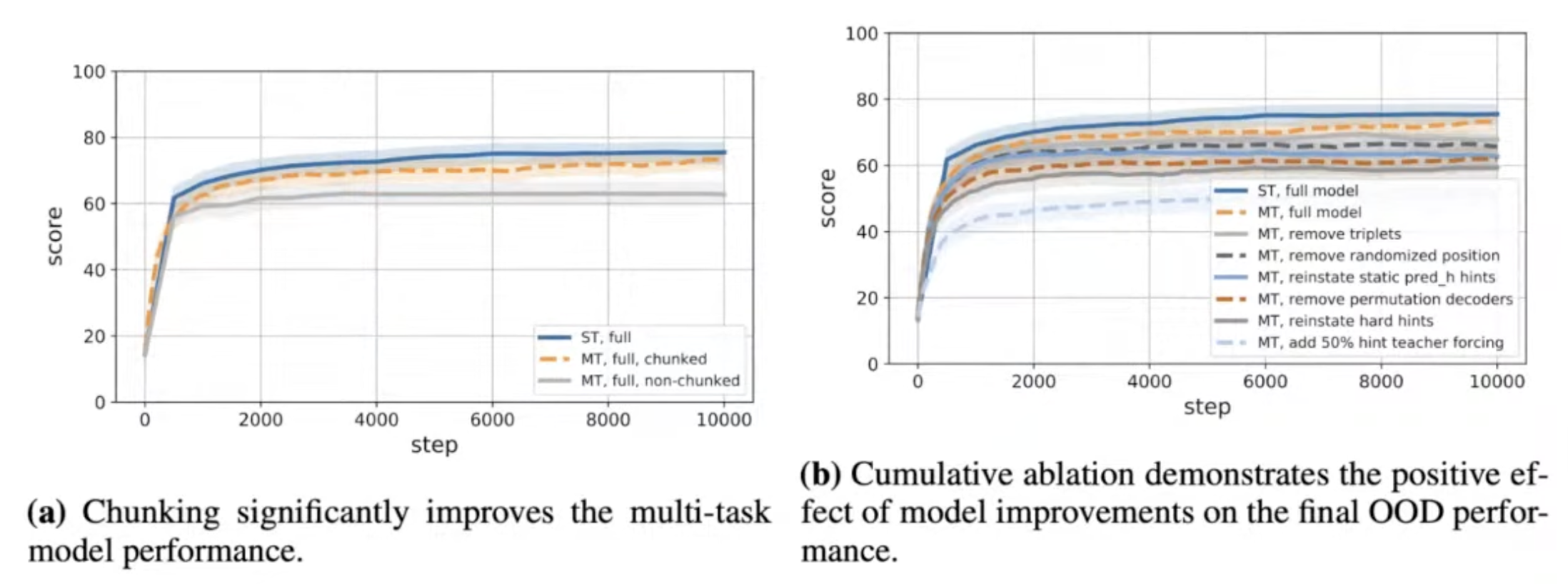
Multi-task learning을 위해 chunking mechanism이 중요했다.
- Trajectory의 length는 16으로 설정한다.
- 16보다 짧은 sample들은 padding 되지 않고 그냥 다음 task가 concat 된다.
즉, padding 없이 쭉 연결된 형태이며, 이렇게 구성하면 memory-efficient 하고 학습이 안정화되는 효과가 있었다.
이렇게 해도 되는 이유는 CLRS-30 task는 Markovian 이기 때문이다.
Single generalist that matches the thirty specialists
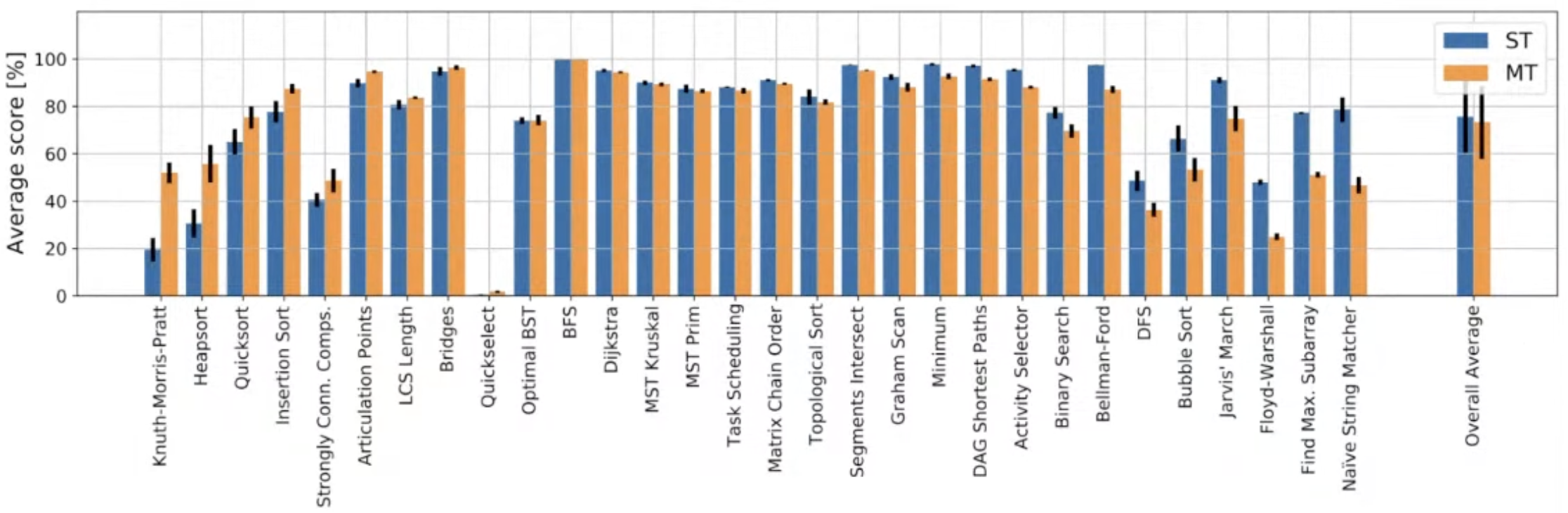
Chunking helps significantly